



(1)创建有限元模型
1)依次单击【开始】和【高级仿真】按钮,在【仿真导航器】窗口的分级树中右击【Planet Gear.prt】节点,从弹出的快捷菜单中选择【新建FEM】命令,弹出【新建部件文件】对话框,【新文件名】下面的【名称】选项默认为【Planet Gear_fem1.fem】,单击按钮 ,选择本实例高级仿真相关数据存放的文件夹,单击【确定】按钮,如图6-6所示。
,选择本实例高级仿真相关数据存放的文件夹,单击【确定】按钮,如图6-6所示。
2)弹出【新建FEM】对话框,【求解器】和【分析类型】中的选项采用默认设置,单击【确定】按钮,进入创建有限元模型的环境。注意在【仿真导航器】窗口分级树上出现了相关节点,如图6-7所示。展开【多边形几何体】,发现新增了4个子节点,分别单击这4个子节点,与图形窗口的几何体相对应,其中【shaft.prt.8(1)】、【shaft.prt.8(2)】、【shaft.prt.8(4)】分别代表行星轮系统中的3个行星轮几何模型;【pcs2.prt.22(3)】代表行星轮系统中行星架的几何模型。
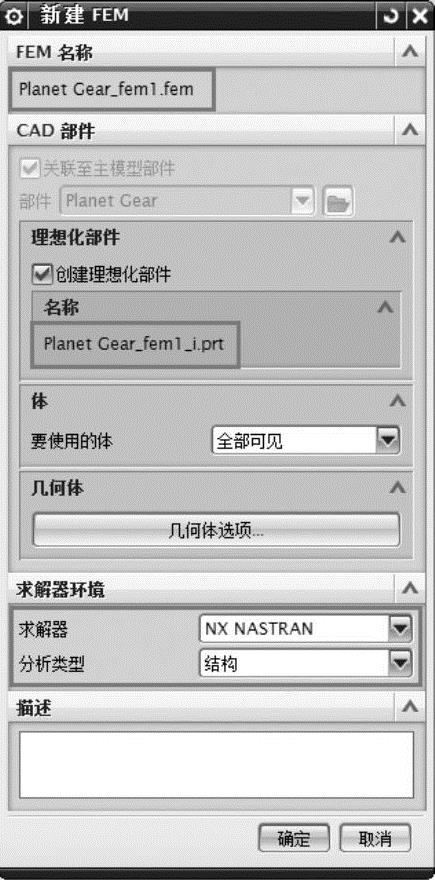
图6-6 【新建行FEM】对话框
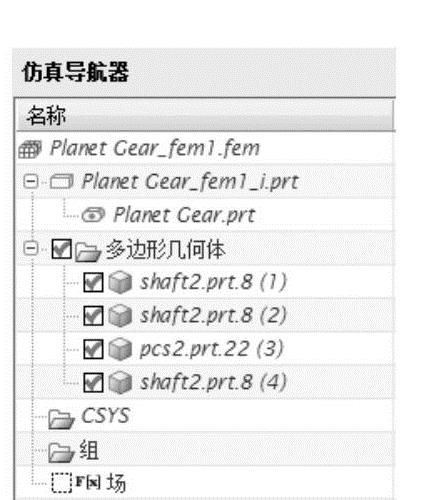
图6-7 仿真导航器中新增的几何节点
3)单击工具栏中的【材料属性】 按钮,弹出【指派材料】对话框。在图形窗口选中行星轮系统的4个几何模型,选择【材料列表】中【库材料】中的【Iron_40】,单击列表框下面的【显示指定材料的材料属性】
按钮,弹出【指派材料】对话框。在图形窗口选中行星轮系统的4个几何模型,选择【材料列表】中【库材料】中的【Iron_40】,单击列表框下面的【显示指定材料的材料属性】 按钮,弹出该材料的信息窗口并查看相关参数,关闭该信息对话框,单击【确定】按钮,如图6-8所示。
按钮,弹出该材料的信息窗口并查看相关参数,关闭该信息对话框,单击【确定】按钮,如图6-8所示。
4)单击工具栏中的【物理属性】 按钮,弹出【物理属性表管理器】对话框,如图6-9所示。【创建】的子选项的【类型】默认为【PSOLID】,【名称】默认为【PSOLID1】,【标签】默认为【1】,单击【创建】按钮,弹出【PSOLID】对话框,如图6-10所示。在【材料】下拉列表框中选取【Iron_40】子项,其他参数均为默认值,单击【确定】按钮,返回到【物理属性表管理器】对话框。
按钮,弹出【物理属性表管理器】对话框,如图6-9所示。【创建】的子选项的【类型】默认为【PSOLID】,【名称】默认为【PSOLID1】,【标签】默认为【1】,单击【创建】按钮,弹出【PSOLID】对话框,如图6-10所示。在【材料】下拉列表框中选取【Iron_40】子项,其他参数均为默认值,单击【确定】按钮,返回到【物理属性表管理器】对话框。

图6-8 【指派材料】对话框
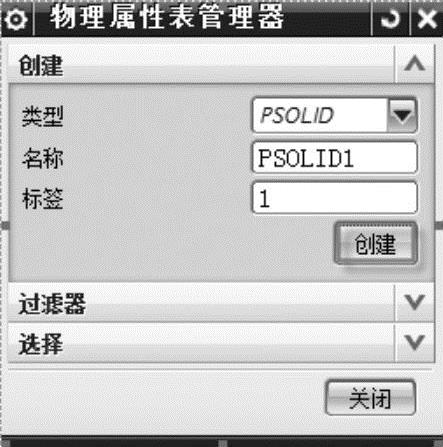
图6-9 新建行星轮系统物理属性
5)单击工具栏中的【网格收集器】 按钮,弹出【网格收集器】对话框,【单元拓扑结构】的各个选项保留默认设置,【物理属性】下的【类型】默认为【PSOLID】,在【实体属性】下拉列表框中选取上述设置的【PSOLID1】,网格名称默认为【Solid(1)】,单击【确定】按钮,完成创建行星轮系统的网格属性设置,如图6-11所示。
按钮,弹出【网格收集器】对话框,【单元拓扑结构】的各个选项保留默认设置,【物理属性】下的【类型】默认为【PSOLID】,在【实体属性】下拉列表框中选取上述设置的【PSOLID1】,网格名称默认为【Solid(1)】,单击【确定】按钮,完成创建行星轮系统的网格属性设置,如图6-11所示。
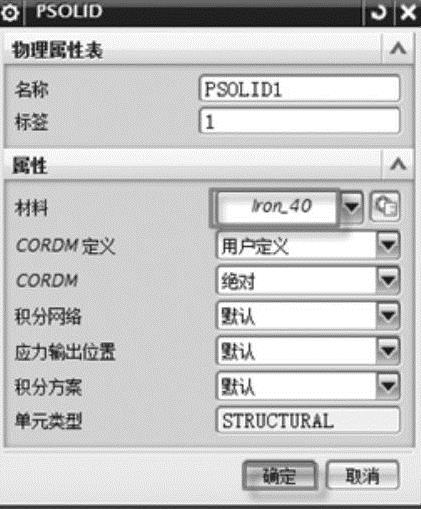
图6-10 【PSOLID】对话框
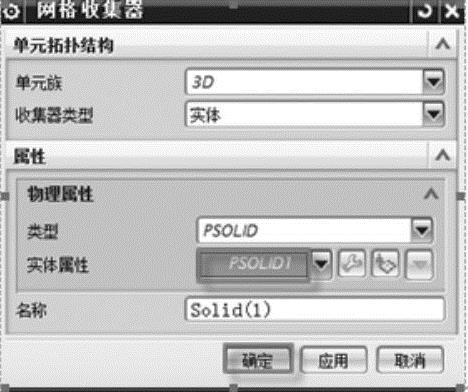
图6-11 新建行星轮模型的网格收集器
6)单击工具栏中的【3D四面体网格】 按钮,弹出【3D四面体网格】对话框。在图形窗口中选中行星轮系统的4个部件,单元类型默认为【CTETRA(10)】,单击【单元大小】右侧的【单元大小】
按钮,弹出【3D四面体网格】对话框。在图形窗口中选中行星轮系统的4个部件,单元类型默认为【CTETRA(10)】,单击【单元大小】右侧的【单元大小】 按钮,在【单元大小】文本框内输入【27.4】,取消勾选【目标收集器】下面的【自动创建】复选框,将【网格收集器】右侧的选项切换为上述操作定义的【Solid(1)】,其他参数保留默认设置,如图6-12所示。单击【应用】按钮,完成行星轮模型的网格划分操作,其网格划分的效果如图6-13所示。
按钮,在【单元大小】文本框内输入【27.4】,取消勾选【目标收集器】下面的【自动创建】复选框,将【网格收集器】右侧的选项切换为上述操作定义的【Solid(1)】,其他参数保留默认设置,如图6-12所示。单击【应用】按钮,完成行星轮模型的网格划分操作,其网格划分的效果如图6-13所示。
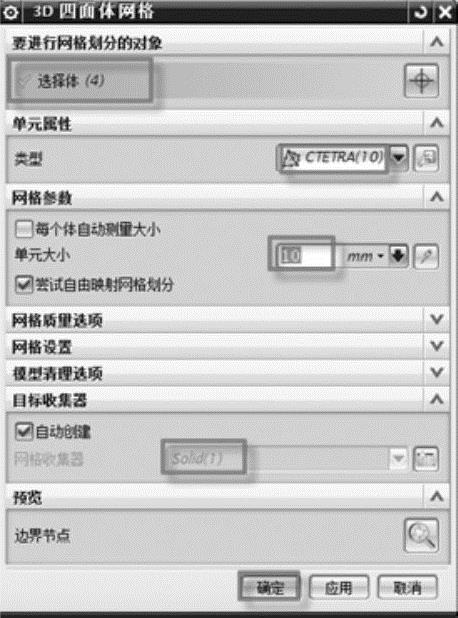
图6-12 【3D四面体网格】对话框
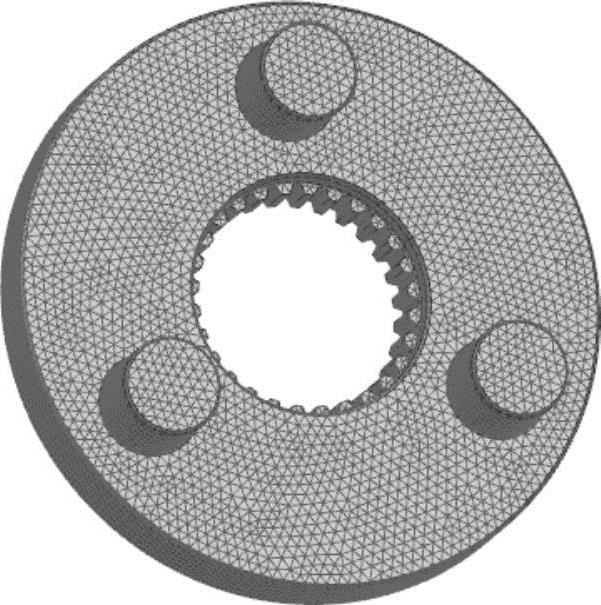
图6-13 划分好的行星轮系统网格模型
7)划分好网格单元后,在【仿真导航器】窗口中出现图6-14所示的4个部件网格体节点。在窗口菜单中选择【单元质量】 命令,出现图6-15所示的【单元质量】对话框,选择已经划分好的行星轮系统4个网格体作为【要检查的单元】中【选定的】对象,单击【检查单元】按钮,检查划分好的网格质量。检查的信息可以在弹出的信息窗口中进行查看。在窗口上显示“0个失败单元,8个警告单元”。8个警告单元对本次的分析精度没有大的影响,主要是因为行星轮系统理想体模型没有进行删除3个行星轮及行星架的圆倒角。
命令,出现图6-15所示的【单元质量】对话框,选择已经划分好的行星轮系统4个网格体作为【要检查的单元】中【选定的】对象,单击【检查单元】按钮,检查划分好的网格质量。检查的信息可以在弹出的信息窗口中进行查看。在窗口上显示“0个失败单元,8个警告单元”。8个警告单元对本次的分析精度没有大的影响,主要是因为行星轮系统理想体模型没有进行删除3个行星轮及行星架的圆倒角。
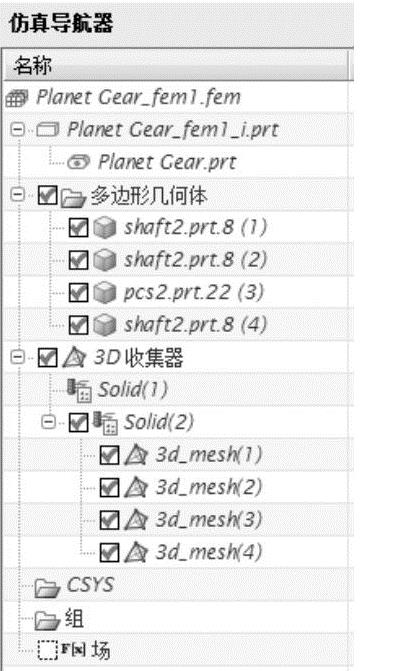
图6-14 新增网格节点
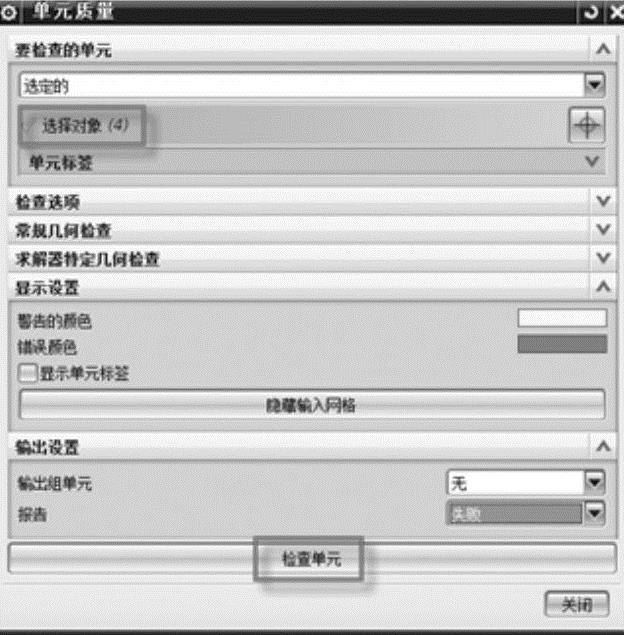
图6-15 【单元质量】对话框
提示
可以在【报告】中选择【警告】或【警告或失败】,将警告的单元或失败的单元显示出来。当然也可以选择【自动修复几何体】 命令,利用其删除圆角的功能把不利于划分网格和影响网格质量的圆角删除,具体操作方法读者可以自己尝试一下。
命令,利用其删除圆角的功能把不利于划分网格和影响网格质量的圆角删除,具体操作方法读者可以自己尝试一下。
(2)创建仿真模型
在【仿真导航器】窗口分级树中,右击【Planet Gear_fem1.fem】节点,从弹出的快捷菜单中选择【新建仿真】命令,弹出【新建部件文件】对话框,【名称】默认为【Planet Gear_fem1_sim1.sim】,选择合适的保存文件夹,单击【确定】按钮,再单击弹出的【新建仿真】对话框中的【确定】按钮,如图6-16中所示。单击弹出的【解算方案】对话框中的【确定】按钮,进入仿真模型环境。注意:也可以在该操作步骤的【工况控制】选项中设置有关面接触方案解算参数,并在【输出请求】中定义接触结果的输出选项,如图6-17所示。
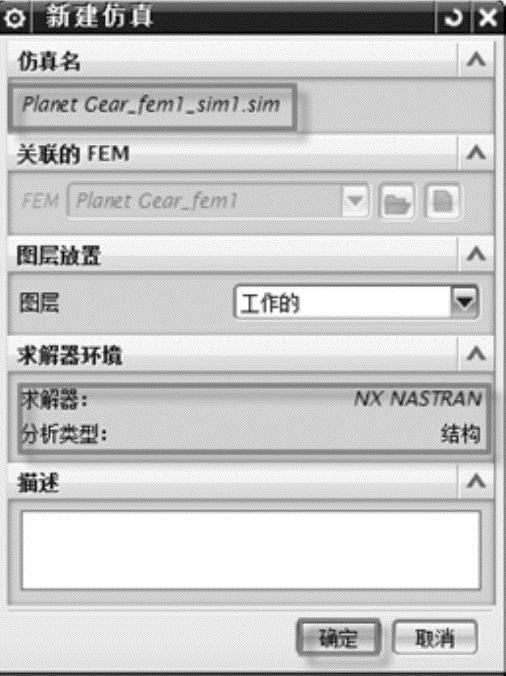
图6-16 【新建仿真】对话框
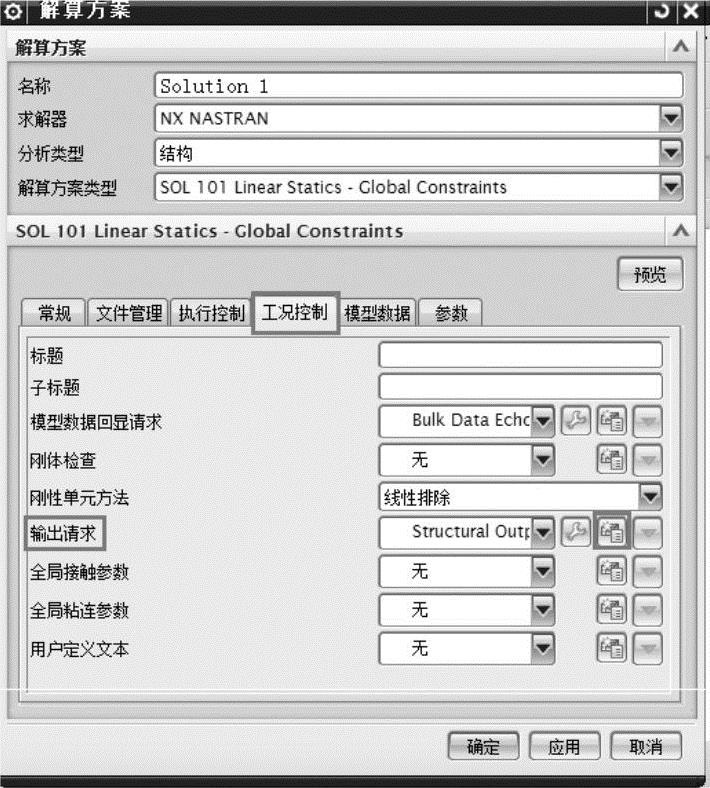
图6-17 仿真解算方案设置与定义
(3)过盈接触面对的定义
1)在工具栏中单击【仿真对象类型】 按钮右侧的下拉按钮,选择弹出的【面对面接触】
按钮右侧的下拉按钮,选择弹出的【面对面接触】 命令,弹出图6-18所示的【面对面接触】对话框,【类型】默认为【自动配对】,【名称】默认为【Face Contact(1)】;单击【创建自动面对】中的
命令,弹出图6-18所示的【面对面接触】对话框,【类型】默认为【自动配对】,【名称】默认为【Face Contact(1)】;单击【创建自动面对】中的 按钮,弹出图6-19所示的【Create Automatic Face Pairs】对话框,在图形窗口中选取整个行星轮系统的158个面作为搜索的对象,默认搜索条件【属性】参数,单击【确定】按钮,在图6-18中的【创建自动面对】中出现【面对3】,表示有3对面被选中,可以在图形窗口中进行查看选中的接触面对。【静摩擦系数】中输入【0.3】,如图6-20所示,单击【局部接触对参数】中【线性替代】右侧的【创建建模对象】
按钮,弹出图6-19所示的【Create Automatic Face Pairs】对话框,在图形窗口中选取整个行星轮系统的158个面作为搜索的对象,默认搜索条件【属性】参数,单击【确定】按钮,在图6-18中的【创建自动面对】中出现【面对3】,表示有3对面被选中,可以在图形窗口中进行查看选中的接触面对。【静摩擦系数】中输入【0.3】,如图6-20所示,单击【局部接触对参数】中【线性替代】右侧的【创建建模对象】 按钮,弹出图6-21所示的对话框,在【法向罚因子(PENN)】中输入【1】,【切向罚因子(PENT)】中输入【0.1】,单击【确定】按钮,关闭接触参数设置对话框。单击【确定】按钮,完成【面对面接触】参数的设置。
按钮,弹出图6-21所示的对话框,在【法向罚因子(PENN)】中输入【1】,【切向罚因子(PENT)】中输入【0.1】,单击【确定】按钮,关闭接触参数设置对话框。单击【确定】按钮,完成【面对面接触】参数的设置。

图6-18 【面对面接触】对话框

图6-19 搜索自动接触面对
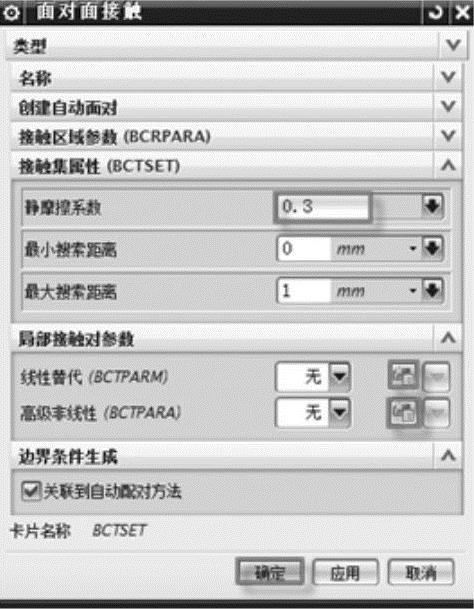
图6-20 设置摩擦系数及接触参数对话框
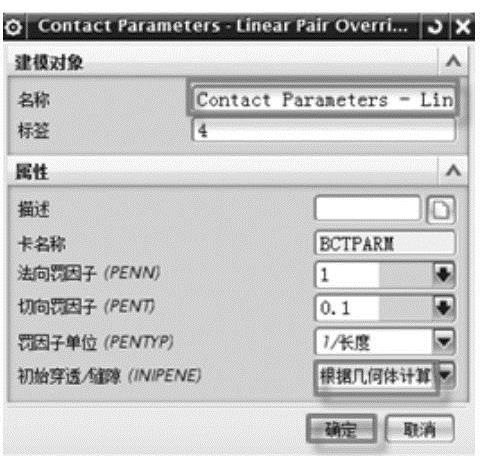
图6-21 局部接触参数定义
提示
【面对面胶(粘)合】 命令主要是把两个接触面连接在一起,同时防止它们在相互之间出现任何方向上的相对运动,要模拟实际的接触状态,还缺少接触单元,无法定义过盈量,也得不到接触压力、接触应力、接触力等接触结果,因此在处理接触问题上,它的模拟效果不如【面对面接触】
命令主要是把两个接触面连接在一起,同时防止它们在相互之间出现任何方向上的相对运动,要模拟实际的接触状态,还缺少接触单元,无法定义过盈量,也得不到接触压力、接触应力、接触力等接触结果,因此在处理接触问题上,它的模拟效果不如【面对面接触】 命令。
命令。
在自动定义接触面时,要充分考虑面与面的接触间隙,保证搜索的距离公差。静摩擦系数可以查找相关的设计资料来取定。一般来说,采用罚函数法的接触算法,法向罚因子是切向罚因子的10倍。接触参数可以使用局部接触参数,也可以在解算方案中进行设置。
2)在图形窗口检查各个面接触的符号,发现有一对面接触的箭头方向与其他两个接触面对方向不同,如图6-22所示;可以在菜单中选择该面对,右击选择【编辑】命令,单击【交换区域】 按钮,即可改变接触的方向。调整好的接触面对如图6-23所示。
按钮,即可改变接触的方向。调整好的接触面对如图6-23所示。
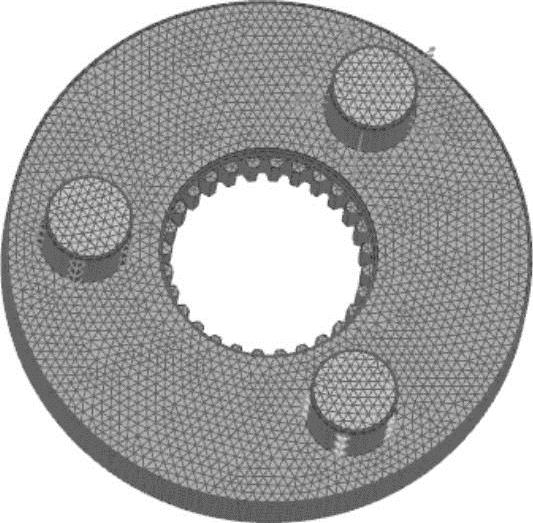
图6-22 接触对接触方向检查
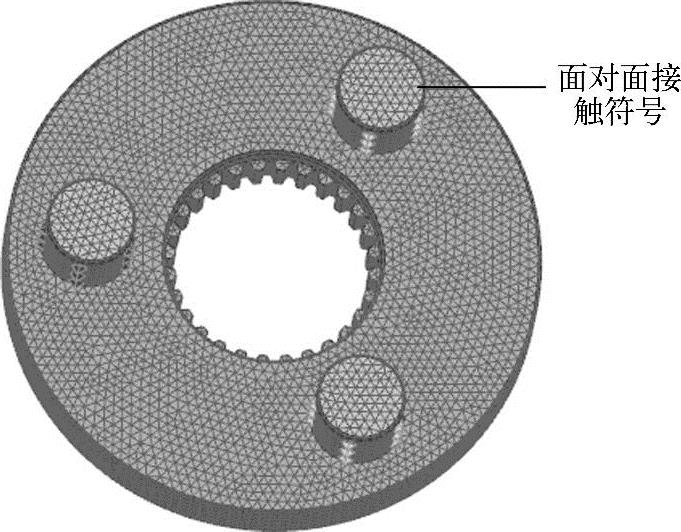
图6-23 接触对接触方向调整(https://www.xing528.com)
(4)施加边界条件
选择工具栏【约束类型】 中的【固定约束】
中的【固定约束】 命令,弹出【固定约束】对话框,如图6-24所示。在视图窗口单击左侧视图,选择套索
命令,弹出【固定约束】对话框,如图6-24所示。在视图窗口单击左侧视图,选择套索 命令,选择行星架内环部分,如图6-25所示,单击【确定】按钮,完成行星轮系统边界约束的定义。
命令,选择行星架内环部分,如图6-25所示,单击【确定】按钮,完成行星轮系统边界约束的定义。

图6-24 【固定约束】对话框
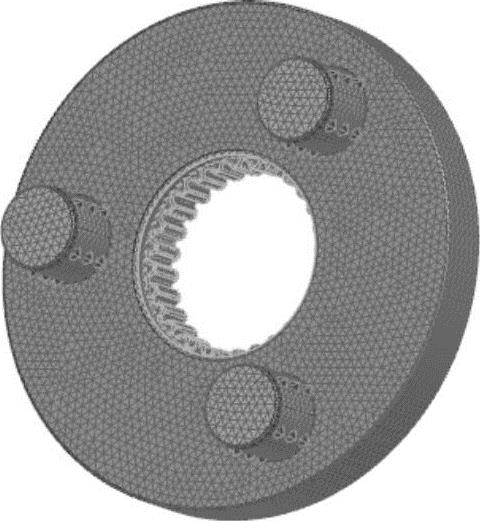
图6-25 选择固定约束的对象
(5)求解及其接触参数的设置
1)在【仿真导航器】窗口的分级树中,右击【Solution1】节点,从弹出的菜单中选择【编辑】 命令,弹出【解算方案】对话框,单击【预览】下面的【工况控制】选项卡,如图6-17所示,单击【输出请求】右侧的【创建模型对象】
命令,弹出【解算方案】对话框,单击【预览】下面的【工况控制】选项卡,如图6-17所示,单击【输出请求】右侧的【创建模型对象】 按钮,弹出【Structural Out-put Requests1】对话框,选中【接触结果】选项卡,勾选【启用BCRESULTS】复选框,如图6-26所示,单击【确定】按钮,返回至【解算方案】对话框。
按钮,弹出【Structural Out-put Requests1】对话框,选中【接触结果】选项卡,勾选【启用BCRESULTS】复选框,如图6-26所示,单击【确定】按钮,返回至【解算方案】对话框。
2)单击【全局接触参数】右侧的【创建模型对象】 按钮,弹出图6-27所示的【Contact Parameters-Linear Global1】对话框,在【法向罚因子(PENN)】中输入【1】,【切向罚因子(PENT)】中输入【0.1】,其他接触参数保留默认设置,单击【确定】按钮,返回至【解算方案】对话框,再次单击【确定】按钮,完成求解参数的设置。
按钮,弹出图6-27所示的【Contact Parameters-Linear Global1】对话框,在【法向罚因子(PENN)】中输入【1】,【切向罚因子(PENT)】中输入【0.1】,其他接触参数保留默认设置,单击【确定】按钮,返回至【解算方案】对话框,再次单击【确定】按钮,完成求解参数的设置。
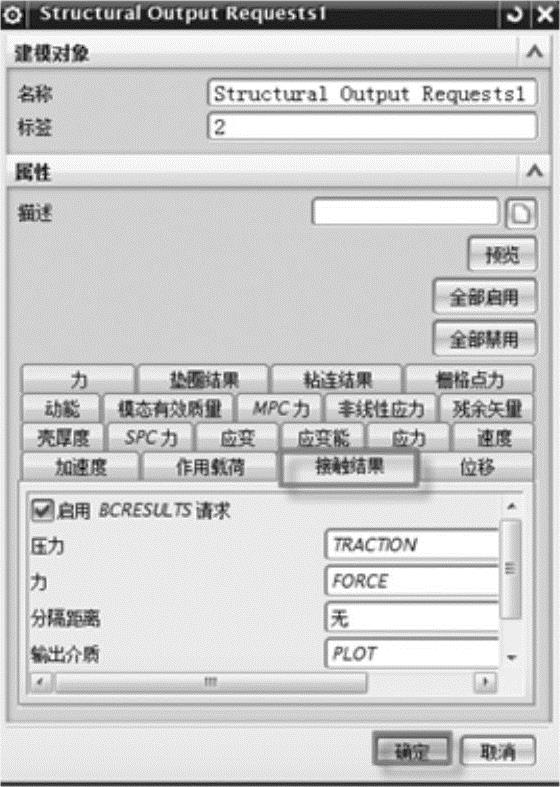
图6-26 接触结果设置
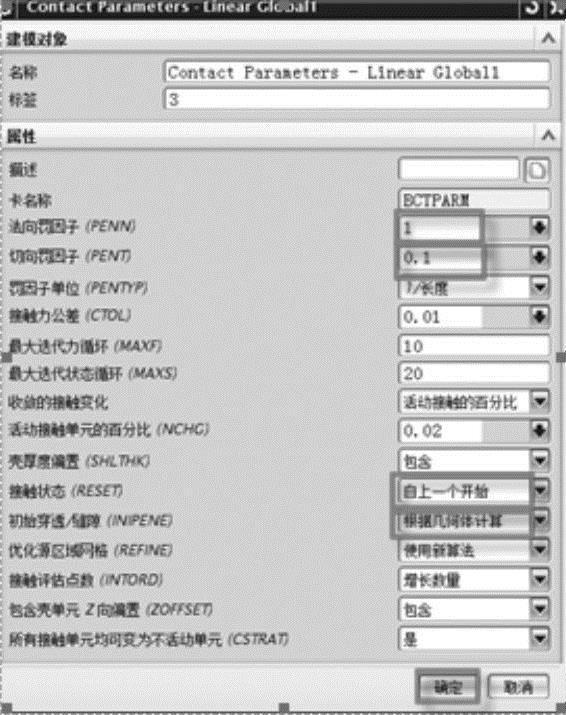
图6-27 全局接触参数设置
3)在【仿真导航器】窗口中右击【Solution 1】节点,从弹出的菜单中选择【求解】 命令,弹出【求解】对话框,单击【确定】按钮,依次出现【模型检查】、【分析作业监视器】和【解算监视器】3个对话框,其中【解算监视器】对话框包括【解算方案信息】、【稀疏矩阵求解器】和【接触分析收敛】选项卡,其中【接触分析收敛】选项卡显示计算过程的收敛状态,如图6-28所示。如果上述面接触设置参数正确,计算会顺利进行,注意面接触分析的计算规模相对较大,计算的时间较长。
命令,弹出【求解】对话框,单击【确定】按钮,依次出现【模型检查】、【分析作业监视器】和【解算监视器】3个对话框,其中【解算监视器】对话框包括【解算方案信息】、【稀疏矩阵求解器】和【接触分析收敛】选项卡,其中【接触分析收敛】选项卡显示计算过程的收敛状态,如图6-28所示。如果上述面接触设置参数正确,计算会顺利进行,注意面接触分析的计算规模相对较大,计算的时间较长。
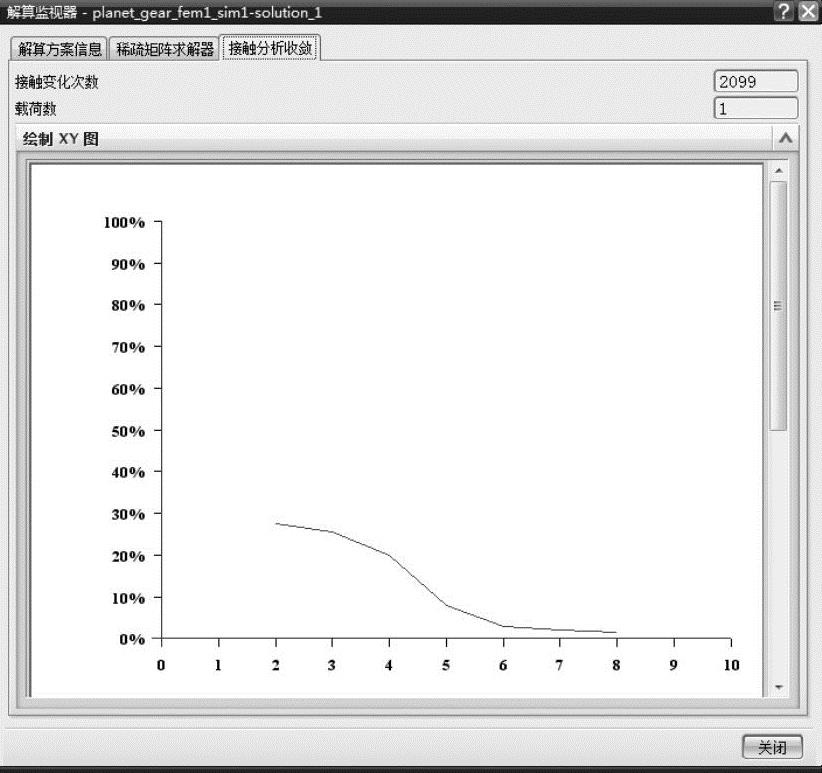
图6-28 接触分析收敛监视器
4)稍等,出现【完成分析作业】的提示后,关闭各个信息窗口,双击出现的【结果】节点,进入后处理分析环境。
(6)接触结果的查看
1)在【后处理导航器】窗口的分级树中,可以注意到增加了接触分析结果的类型:【接触牵引-节点的】、【接触力-节点的】和【接触压力-节点的】,如图6-29所示,可以展开各自的子节点查看相应的分析结果。
2)右击【云图绘图】中的【Post View1】,从弹出的快捷菜单中选择【设置结果】,弹出图6-30所示的【平滑绘图】对话框,在【坐标系】下拉列表框中选择【绝对圆柱坐标系】,其他选项参数保留默认设置,单击【确定】按钮,将后处理中模型的坐标系调整为【绝对圆柱坐标系】。
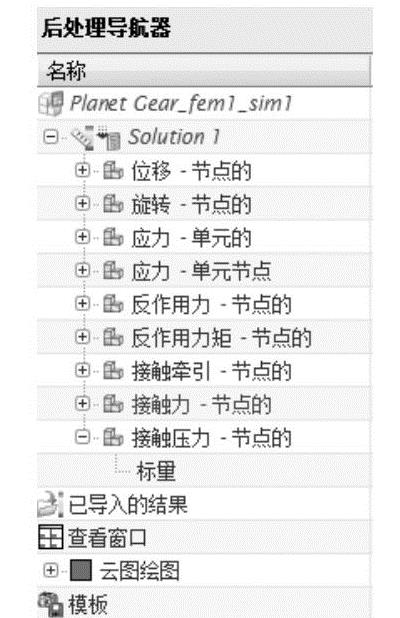
图6-29 接触结果相关节点

图6-30 更改后处理坐标系
3)展开【位移-节点的】,双击【幅值】,查看在过盈接触状态下的行星轮系统接触部位的整体变形情况,如图6-31所示。可以看出,靠近约束的部位变形较小,远离约束的部位变形较大。在窗口命令中选择【标识】 命令,弹出【标识】对话框,在图形窗口依次单击行星架上与某一行星轮接触的内圆表面,在中间部位点取4个节点,在列表框中查看【平均值】的值为0.032mm左右,如图6-32所示。
命令,弹出【标识】对话框,在图形窗口依次单击行星架上与某一行星轮接触的内圆表面,在中间部位点取4个节点,在列表框中查看【平均值】的值为0.032mm左右,如图6-32所示。
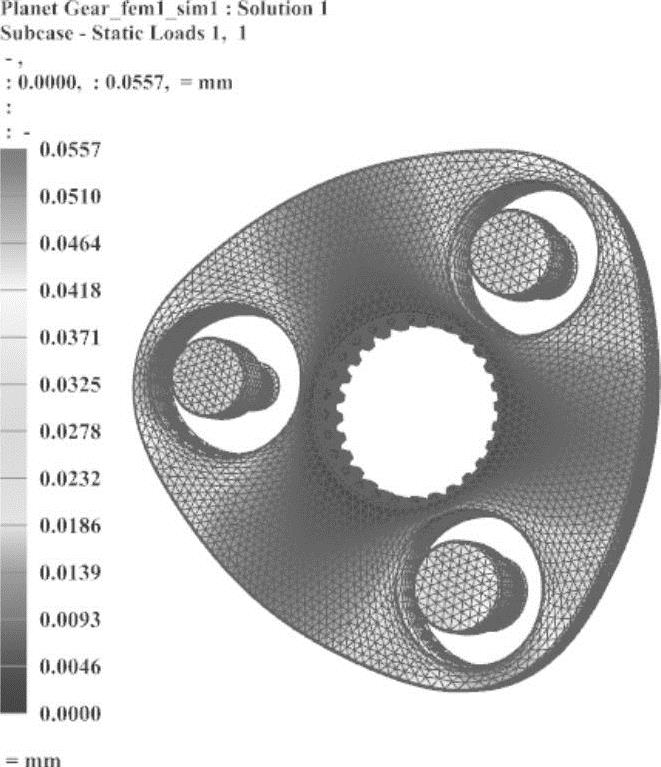
图6-31 接触部位变形情况
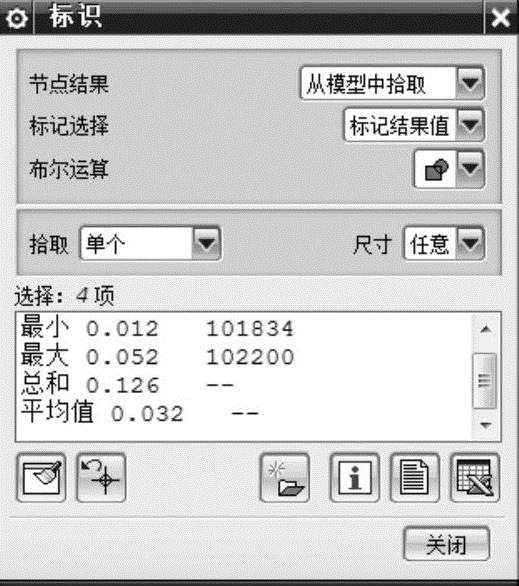
图6-32 查询接触部位的平均变形
4)展开【应力-单元的】,双击【Von Mises】,查看在过盈接触状态下的行星轮系统接触部位的Von Mises应力情况,如图6-33所示。可以看出,在接触圆面的边缘出现应力最大值,是由于网格划分的原因,并不真实,需要查看接触面主要区域的应力情况。在窗口命令中选择【标识】 命令,弹出【标识】对话框,在图形窗口依次单击行星架上与某一行星轮接触的内圆表面,在中间部位点取4个节点,在列表框中查看【平均值】的值为87.751MPa左右,如图6-34所示。
命令,弹出【标识】对话框,在图形窗口依次单击行星架上与某一行星轮接触的内圆表面,在中间部位点取4个节点,在列表框中查看【平均值】的值为87.751MPa左右,如图6-34所示。
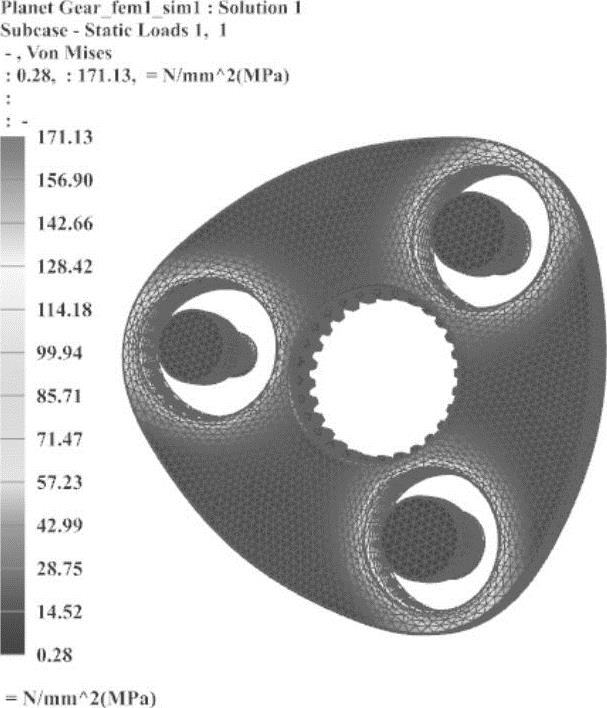
图6-33 行星轮系统在过盈接触状态下的应力
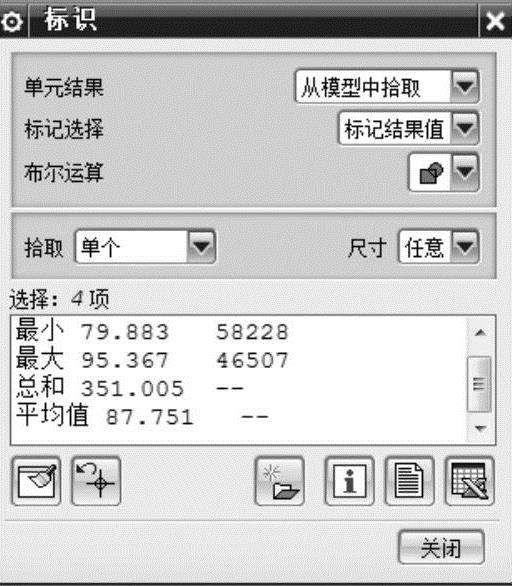
图6-34 行星轮系统在过盈接触状态下的单元平均应力
提示
读者也可以利用【标识】 命令查看自己关心部位的变形及应力情况,还可以查看不同方向的(R、T向)的变形以及其他应力情况,在此不再赘述。
命令查看自己关心部位的变形及应力情况,还可以查看不同方向的(R、T向)的变形以及其他应力情况,在此不再赘述。
5)展开【接触力-节点的】,双击【幅值】节点,在图形窗口中出现整个模型的接触力云图,如图6-35所示。可以看出,同样在接触源面的边缘出现最大值,需要查看主要接触区域的接触力情况。在窗口命令中选择【标识】 命令,弹出【标识】对话框,在图形窗口中依次单击行星架上与某一行星轮接触的内圆表面,在中间部位点取4个节点,在列表框中查看【平均值】的值为423.414N左右,在【PostView1】的【3D单元】中单独选取【3d_mesh(1)】节点。图6-36所示为某一行星轮的接触力显示图。还可以借助窗口中的【动画】功能,查看变形的过程以及接触力的变化情况。
命令,弹出【标识】对话框,在图形窗口中依次单击行星架上与某一行星轮接触的内圆表面,在中间部位点取4个节点,在列表框中查看【平均值】的值为423.414N左右,在【PostView1】的【3D单元】中单独选取【3d_mesh(1)】节点。图6-36所示为某一行星轮的接触力显示图。还可以借助窗口中的【动画】功能,查看变形的过程以及接触力的变化情况。
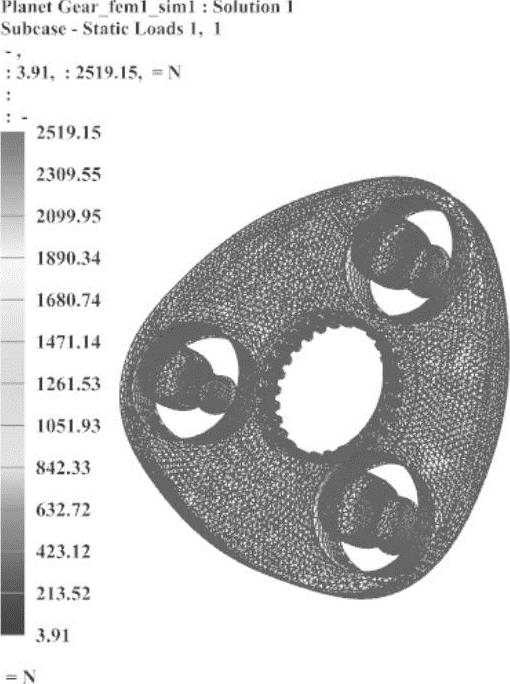
图6-35 行星轮系统在过盈接触状态下的整体接触力

图6-36 行星轮在过盈接触状态下的接触力
提示
读者也可以在【Post View1】的【注释】中选择显示【Maximum】和【Minimum】并对其显示方式进行编辑,可参考前几章的后处理内容,在此不多介绍。
6)展开【接触压力-节点的】节点,双击【标量】子节点,在图形窗口出现整个行星轮系统的接触压力云图,如图6-37所示。可以看出,同样在接触源面的边缘出现最大值,需要查看主要接触区域的接触力情况。在窗口命令中选择【标识】 命令,弹出【标识】对话框,在图形窗口依次单击行星架上与某一行星轮接触的内圆表面,在中间部位点取4个节点,在列表框中查看【平均值】的值为41.836MPa左右。在【Post View1】的【3D单元】中单独选取【3d_mesh(1)】节点,图6-38所示为其中一个行星轮的接触力显示图。还可以借助窗口中的【动画】功能,查看变形的过程以及接触力的变化情况。
命令,弹出【标识】对话框,在图形窗口依次单击行星架上与某一行星轮接触的内圆表面,在中间部位点取4个节点,在列表框中查看【平均值】的值为41.836MPa左右。在【Post View1】的【3D单元】中单独选取【3d_mesh(1)】节点,图6-38所示为其中一个行星轮的接触力显示图。还可以借助窗口中的【动画】功能,查看变形的过程以及接触力的变化情况。
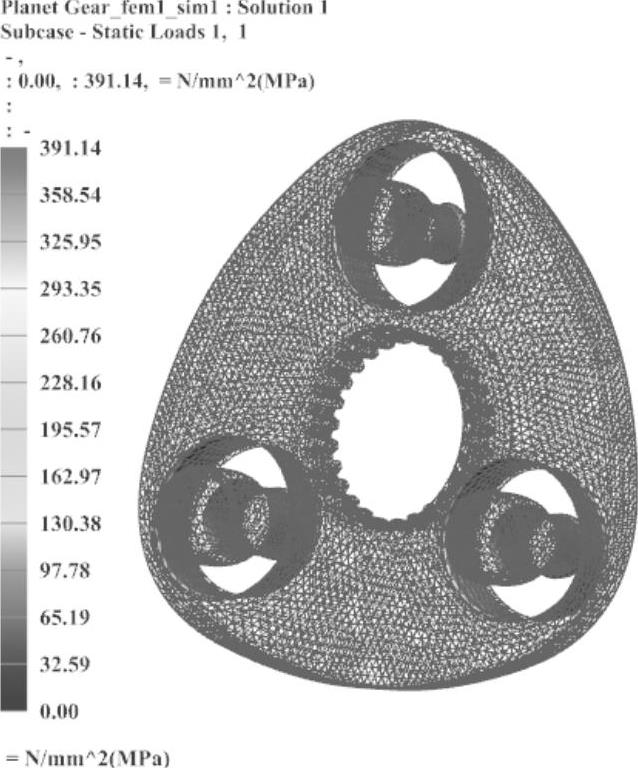
图6-37 行星轮系统在过盈接触状态下的整体接触压力
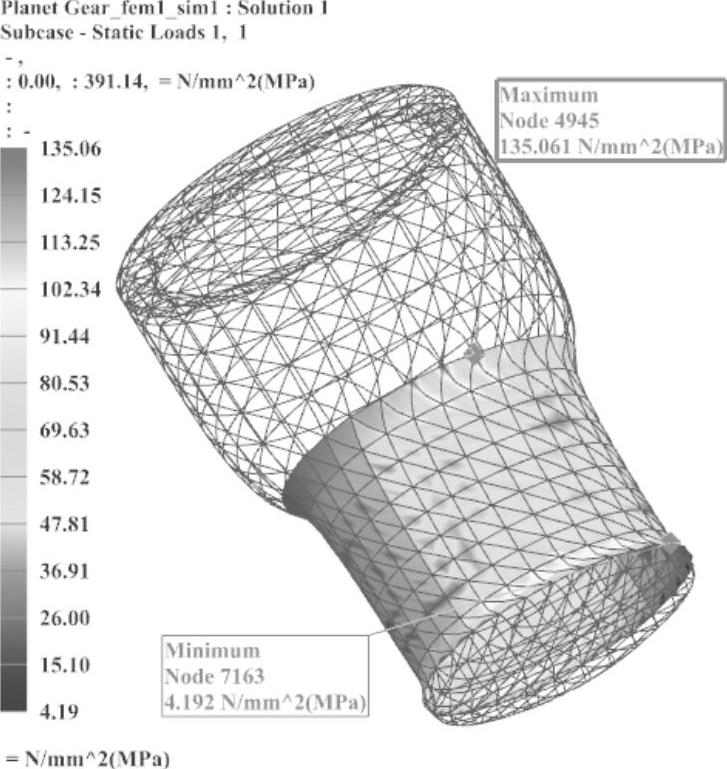
图6-38 行星轮在过盈接触状态下的接触压力
通过对上述分析结果的查看和初步评估,得到如下结论:
a)存在应力集中现象,最大接触力及接触压力出现在行星轮外圆与行星架内圆接触的棱边附近,行星轮最大接触压力为135.06MPa,但没有超过设计规定的许用接触压力150MPa。
b)行星轮与行星架的接触压力分布比较均匀,平均值为42MPa左右,证明上述施加的过盈量不会对接触面造成潜在的破坏,但是在行星轮压入行星架过程中,边缘有塑性变形的可能。
7)单击工具栏中的【返回到模型】 按钮,退出【后处理导航器】窗口;在资源条上单击【仿真导航器】
按钮,退出【后处理导航器】窗口;在资源条上单击【仿真导航器】 按钮,返回到仿真模型环境,在行星轮上施加扭矩,计算和评估出在过盈配合状态下施加扭矩工况下的行星轮系统的变形及应力情况。
按钮,返回到仿真模型环境,在行星轮上施加扭矩,计算和评估出在过盈配合状态下施加扭矩工况下的行星轮系统的变形及应力情况。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。