



独立变桨控制软件系统的设计流程如图7-6所示。
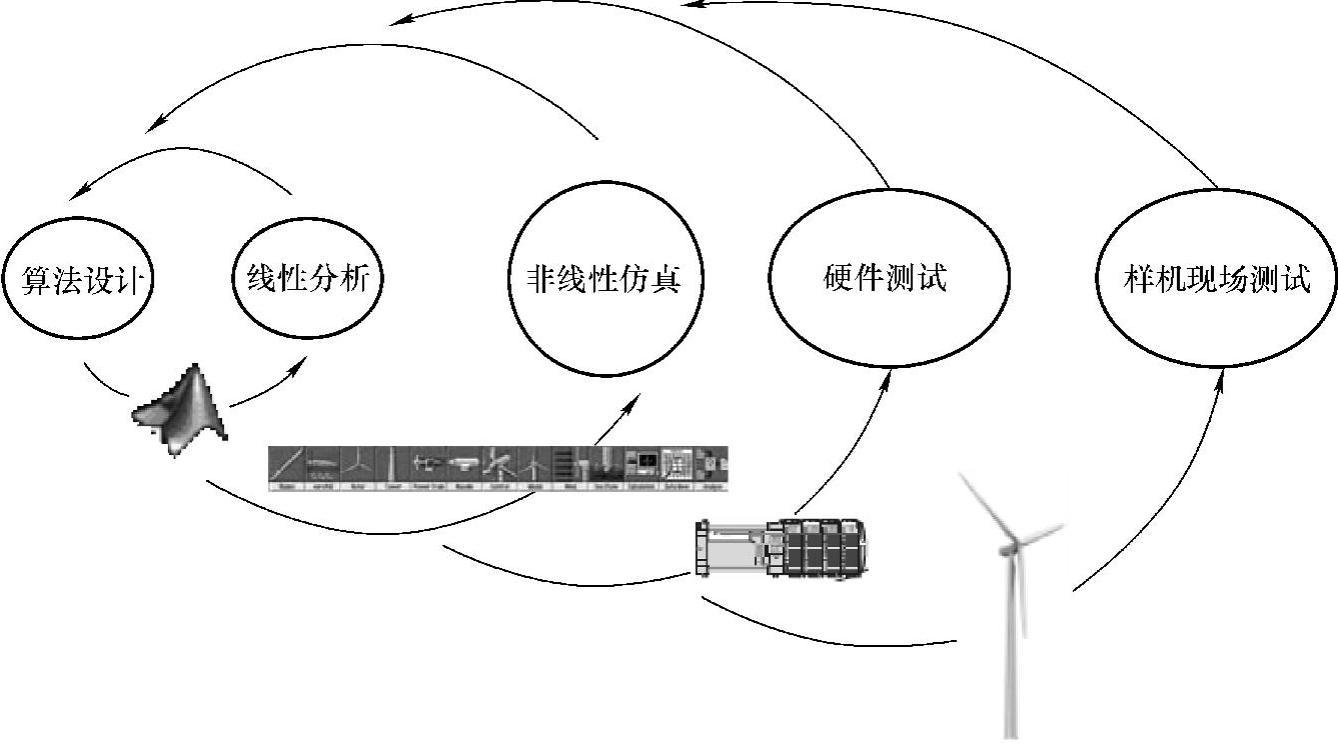
图7-6 独立变桨控制软件系统的设计流程
根据线性化模型,利用Matlab软件进行控制算法的设计,然后进行非线性仿真,在确定各项性能指标和疲劳、极限载荷等均满足设计要求后,编制控制软件,进行工厂动态性能测试,根据测试结果再次调整控制算法结构或者参数,满足要求后再进行现场样机测试,如此反复的过程即是算法设计的过程,利用经典控制理论和现代控制理论保证了算法设计的科学性和实用性。本章以Windey1.5MW机组为例,介绍独立变桨控制软件设计方法。
1.系统建模
用Bladed软件完成Windey 1.5MW机组的建模,利用该模型完成独立变桨算法设计,并通过仿真评估采用独立变桨控制技术后的效果。
Windey 1.5MW风电机组主要运行参数如下:
最大稳态功率:1.5MW;
风轮直径:77m;
轮毂高度:65m;
切入风速:3m/s;
切出风速:25m/s;
额定风速(稳态):11.2m/s;
额定风轮转速:17.23r/min;
最小节距角:0°;
最大变桨速率:10°/s;
最小变桨速率:-10°/s;
发电机额定转速:1800r/min;
发电机最低转速:1030r/min。
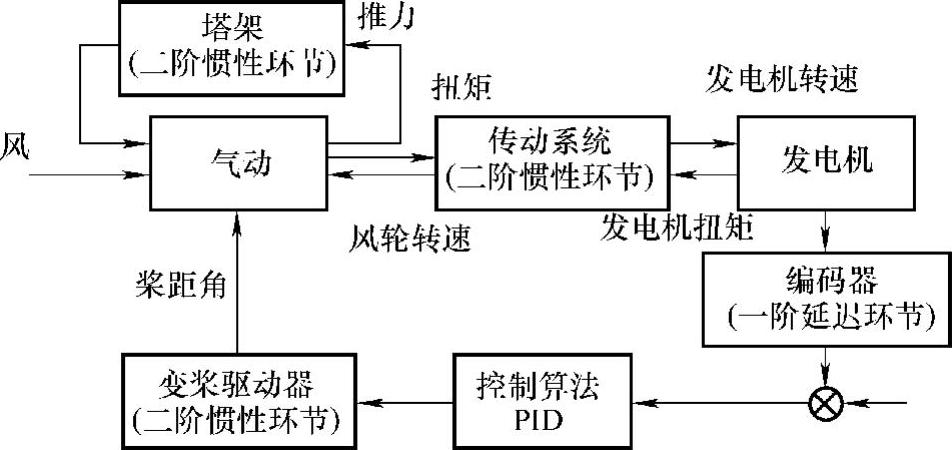
图7-7 数学模型线性化示意图
另外,为了实现独立变桨控制系统设计,需要一个线性化的数学模型,通过分析机组各个环节的动态特性及其相互耦合关系后,将各个复杂的环节用一阶或二阶系统进行线性描述,最终将其线性化得到独立变桨控制状态空间数学模型。线性化的思路可由图7-7描述。
线性化数学模型的结构图可表述如图7-8所示。
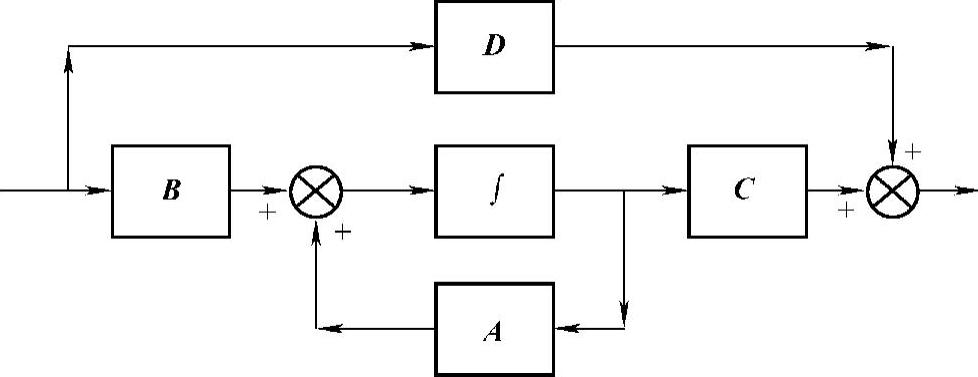
图7-8 独立变桨控制状态空间数学模型
其中:
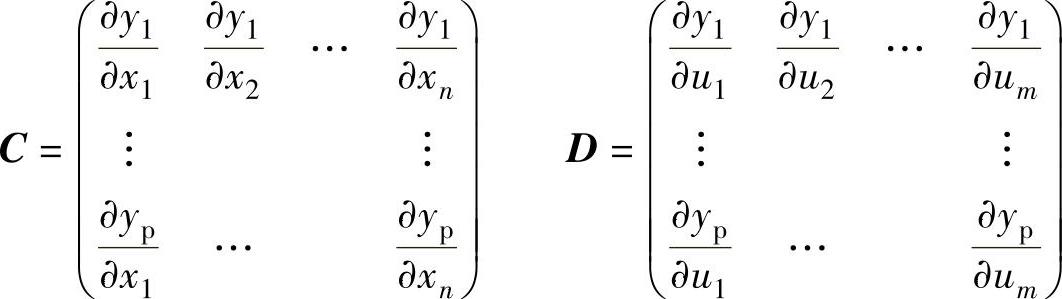
1)输入变量选取:风速给定(协同风速给定、各桨叶风速给定)、桨距角给定(协同桨距角给定、各桨叶桨距给定)、转矩给定。
2)输出变量选取:发电机转速、各桨叶根部弯矩(载荷)、风轮转速、齿轮箱扭矩、功率、发电机转矩、桨距角、变桨速率、机舱位移等。
3)中间状态变量选取:风轮面内、面外1-6阶的位移、速率,塔架前后、左右1-2阶的位移、速率,桨叶角度信息,风轮角度信息等。
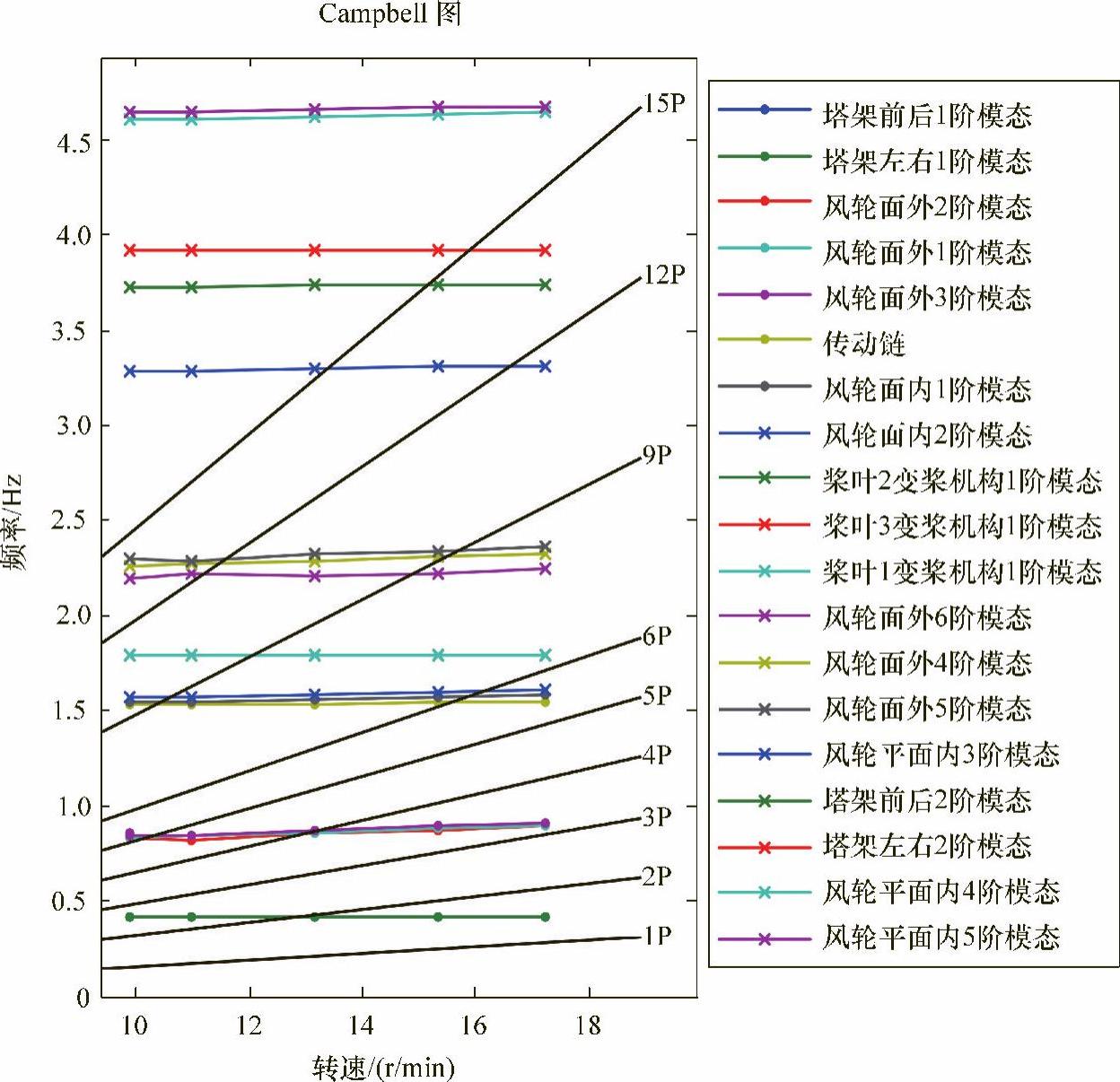
图7-9 Windey 1.5MW机组Campbell图(彩图见封二)
2.动态特性分析
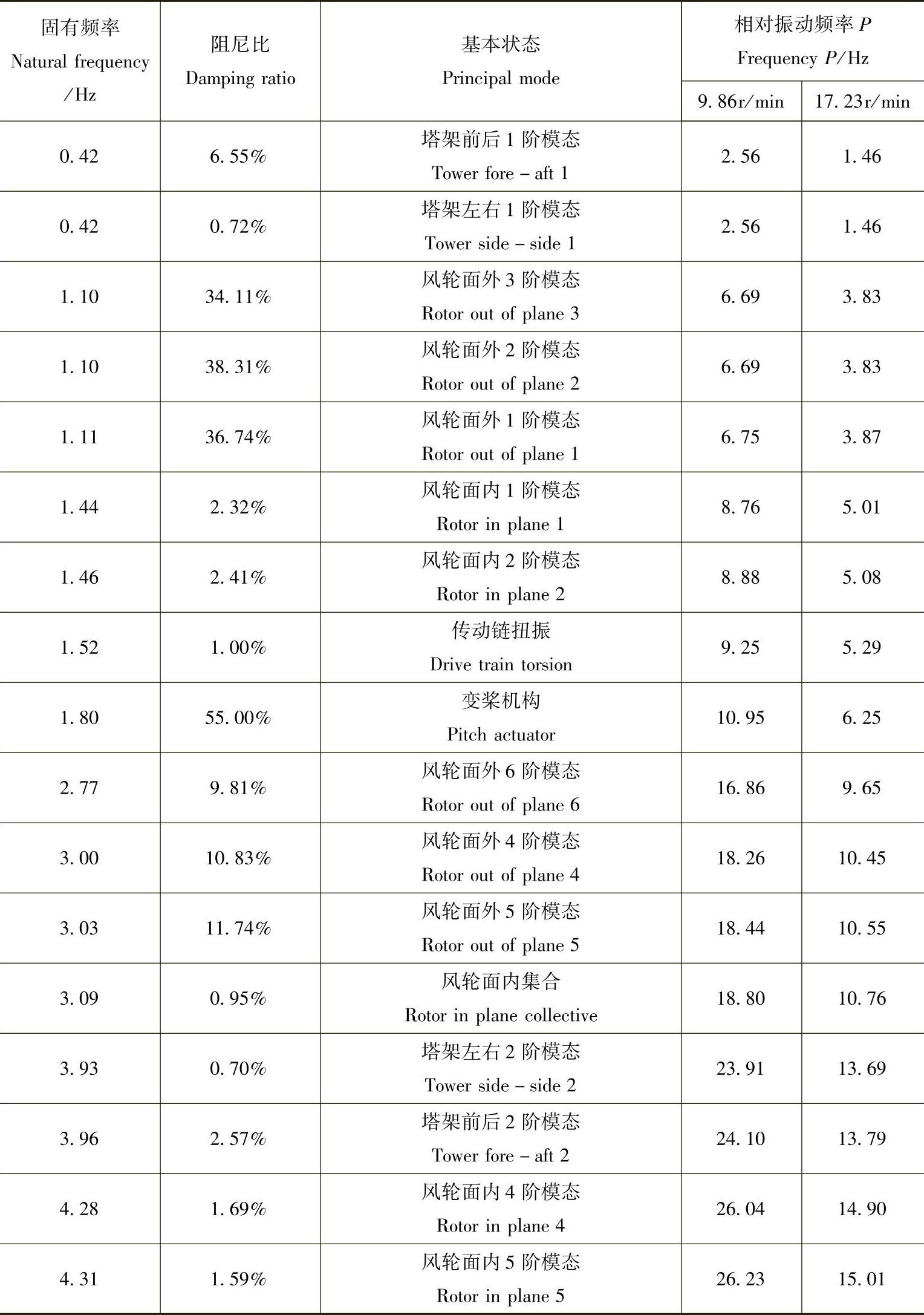
从机组Campbell图和独立变桨控制系统数学模型,可分析风轮、传动系统以及塔架的各阶振动模态和它们之间的耦合关系,以及协同变桨控制和偏差变桨控制直接渗透耦合关系。图7-9为机组线性化处理后的Campbell图。表7-1和7-2分别列出了机组额定风速和切出风速下独立变桨控制的数学模型中各个关键模态耦合后的自然频率和阻尼系数。
表7-1 机组在稳态12m/s风速时的耦合模态
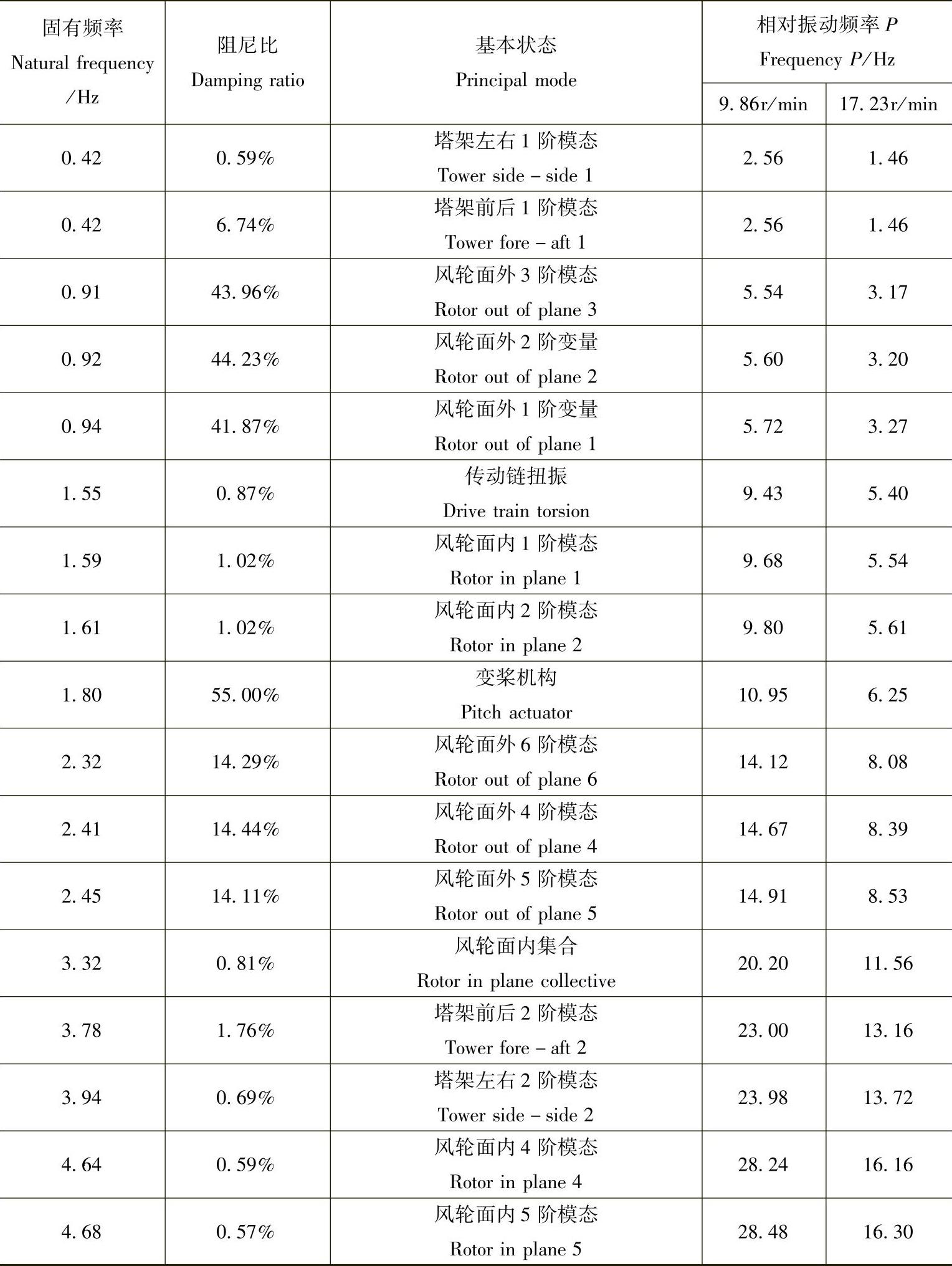
表7-2 机组在稳态25m/s风速时的耦合模态
3.协同变桨控制的控制器设计
协同变桨控制实现功能:既实现风电机组的功率控制。通过协同变桨控制,在低于额定风速时,控制各叶片始终处于最佳节距角附近,以实现最大能量捕获;在高于额定风速,通过协同变桨控制,使发电机输出功率保持稳定。实现协同变桨控制主要包括两个控制:转速-转矩控制环(PID控制)和转速-变桨控制环(PID控制)。为了整定出转速-转矩控制环和转速-变桨控制环的PID和滤波器参数,首先必须得到转速-转矩控制环和转速-变桨控制环传递函数,因此可以借助Matlab软件的线性控制处理工具对上述构建的独立变桨控制系统数学模型进行处理得到转速-转矩控制环和转速-变桨控制环传递函数。
6m/s风速时,Windey 1.5MW机组的转速-转矩控制环开环传递函数(Matlab软件中):


12m/s风速时,Windey 1.5MW机组的转速-变桨控制环开环传递函数(Mat- lab软件中):


25m/s风速时,Windey 1.5MW机组的转速-变桨控制环开环传递函数(Mat- lab软件中):



在Matlab中,利用经典控制器设计工具(根轨迹、伯德图、阶跃响应等),配置出相应的转速-转矩控制环和转速-变桨控制环的控制器参数。
图7-10所示为6m/s风速时,Windey 1.5MW机组的转速-转矩控制环开环伯德图(配置完PID和滤波器参数后),从图可知,转速-转矩控制环具备足够的稳定裕量,稳定性良好。
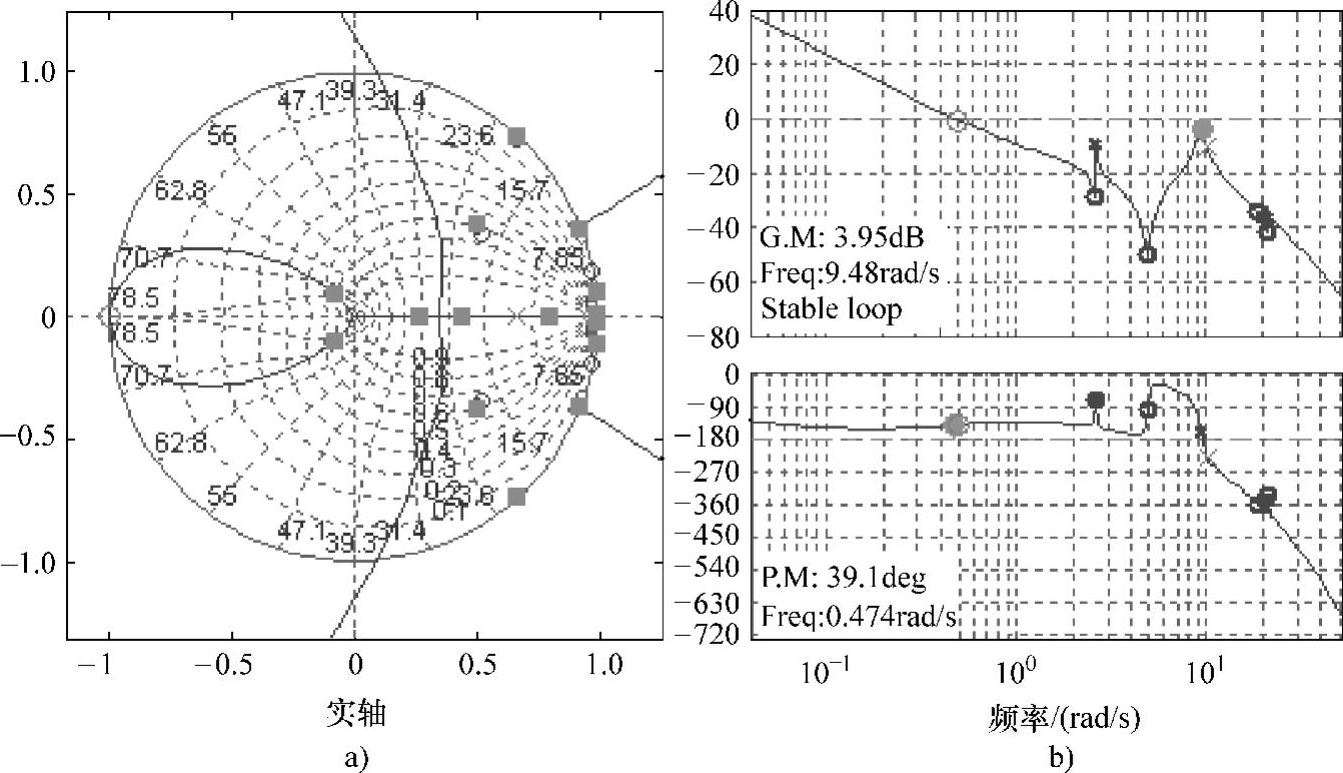
图7-10 转速-转矩控制环的根轨迹图和开环伯德图(风速6m/s)
a)根轨迹图 b)开环伯德图(https://www.xing528.com)
转速-变桨环PID控制器的增益要根据运行点的变化而变化,因为在高风速时桨距角的变化对空气动力扭矩产生的影响要比额定风速时的大,也就是灵敏度要比额定风速时的高,所以可以根据桨距角的变化来调节PI控制器的增益,保证变桨系统从额定风速到切出风速这段风速范围内都具有良好的动态响应和稳定裕度。变桨PI控制器的拉普拉斯形式如下:
式中 K——比例增益;
Ti——积分时间常数。
增益表G是通过在一定的桨距角范围之内对桨距角β进行线性插值求出增益1/G(β)来计算出G(β)的。
同样,我们将积分时间常数也设置成桨距角的线性修正表,使得积分时间常数也随着桨距角的增加而减小,这样可以增加变桨控制环的相位裕度,使得控制器在额定风速附近都具有较宽的带宽。增益表结构图如图7-11所示。

图7-11 变桨控制环中的增益表结构图
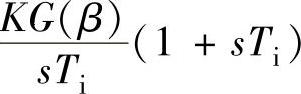
增益系数设计结果如图7-12所示。
图7-12 增益系数设计
由于桨叶的气动特性随桨叶角度和风速的影响较大,在设计变桨控制环节时充分考虑到了机组在不同风速不同桨距角下系统的稳定性,在Matlab中利用线性化数学模型的零极点图设计了全范围风速下的变增益值及参数智能校正装置。图7-13和图7-14分别为12m/s和25m/s风速时,Windey 1.5MW机组的转速-变桨控制环开环伯德图(配置完PID和滤波器参数后),从图中可知,转速-转矩控制环具备足够的稳定裕量,稳定性良好。
4.偏差变桨控制环的控制器(d轴和q轴控制器)设计
大型风电机组的独立变桨控制系统解耦为功率变桨控制环和偏差变桨控制环,通过功率变桨控制环实现功率控制功能,功率变桨控制环输出的是三桨叶期望桨距角的相同部分;通过偏差变桨控制环,实现减小风轮不均衡载荷,进而减小风电机组关键部件载荷,偏差变桨控制环输出的三桨叶桨距角的期望补偿值(见图7-4)。可以用Park坐标变换和逆变换,实现了将偏差变桨控制环(多变量输入输出非线性复杂系统),解耦为两个单输入单输出线性系统,实现采用经典控制理论设计相关控制器,提高独立变桨控制技术的工程实用性。
实现偏差变桨控制环的关键是完成d轴和q轴载荷控制器的设计,因此可以借助Matlab软件的线性控制处理工具对上述构建的独立变桨控制系统数学模型进行处理,分别得到d轴和q轴载荷控制环的传递函数。
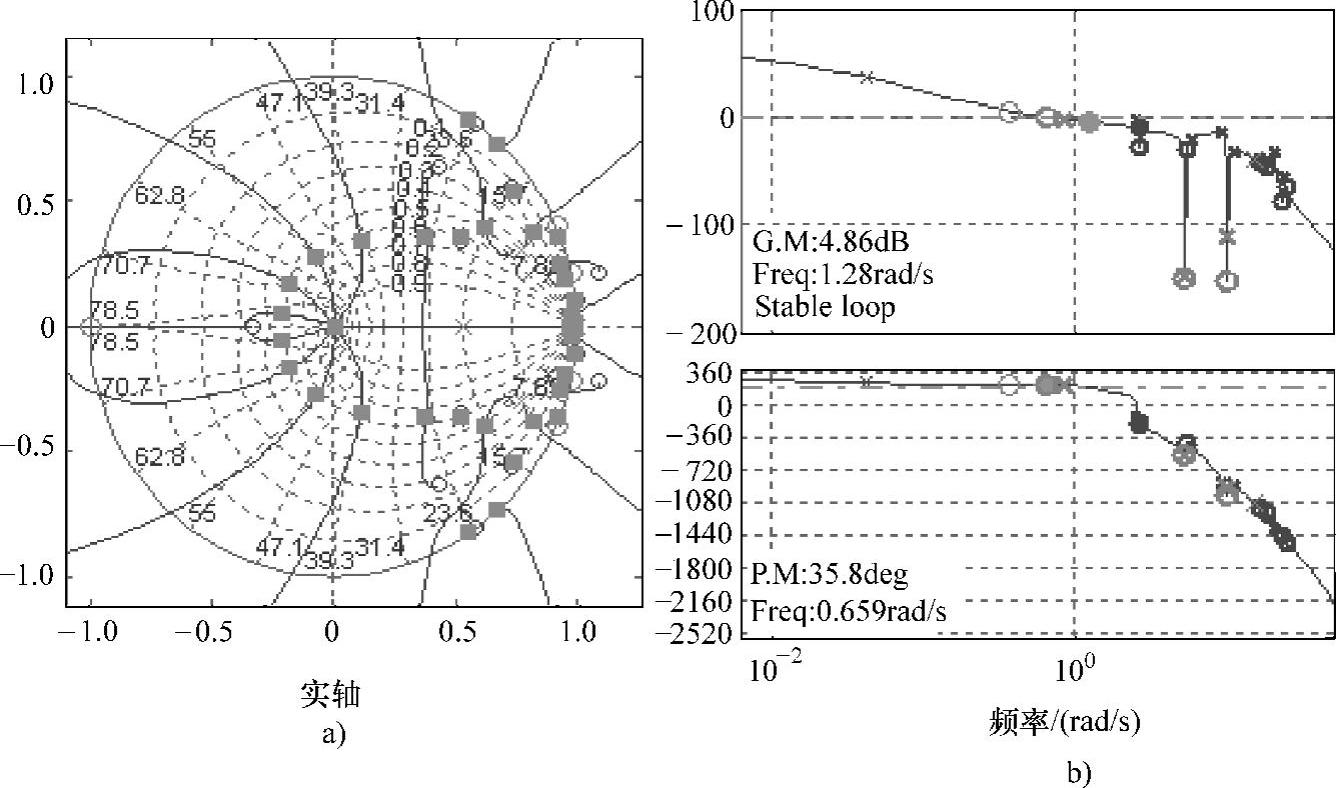
图7-13 转速-变桨控制环的根轨迹图和开环伯德图(风速12m/s)
a)根轨迹图 b)开环伯德图
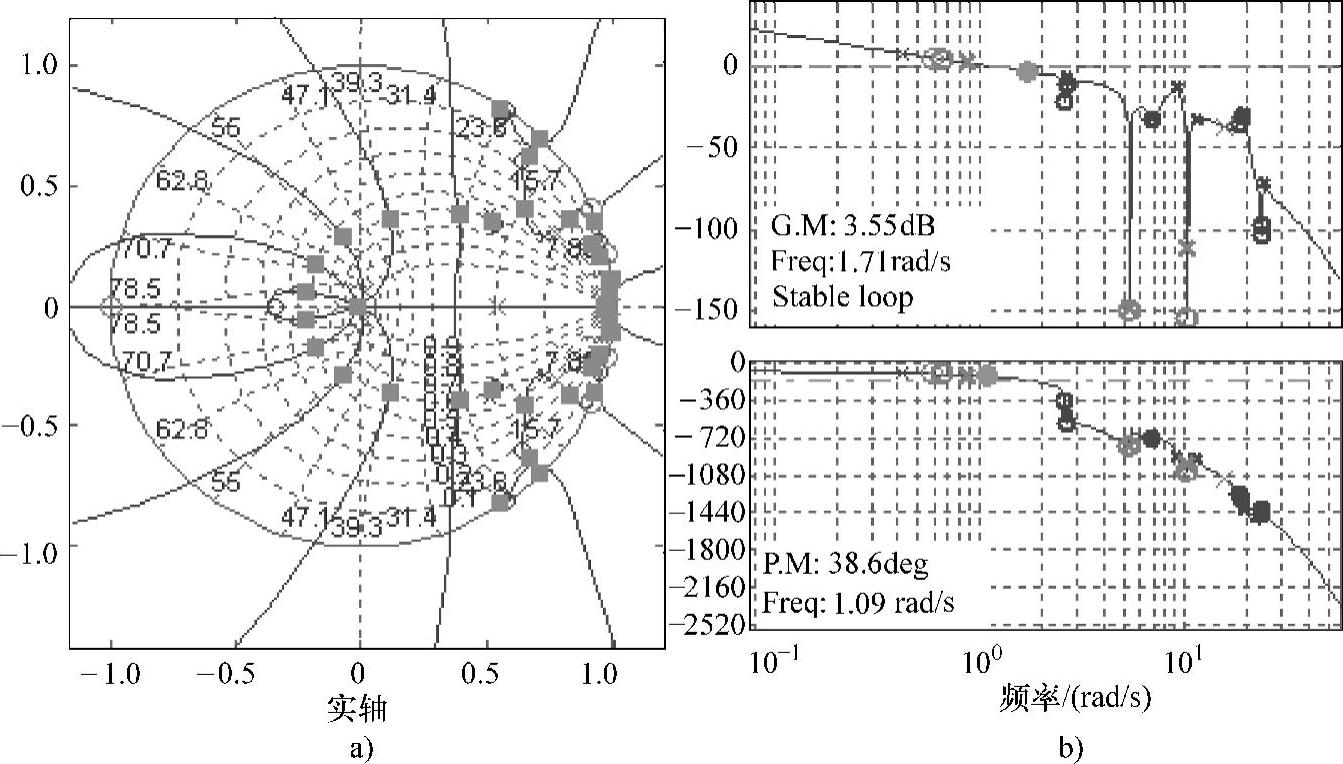
图7-14 转速-变桨控制环的根轨迹图和开环伯德图(风速25m/s)
a)根轨迹图 b)开环伯德图
15m/s风速时,Windey 1.5MW机组的d轴载荷控制(偏差变桨控制)开环传递函数(Matlab软件中):
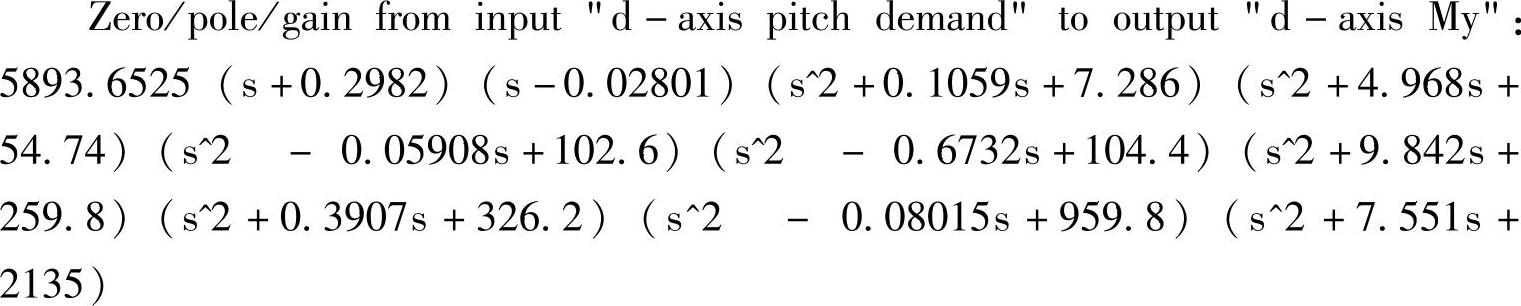

在Matlab中,利用经典控制器设计工具(根轨迹、伯德图、阶跃响应等),配置出相应的d轴载荷控制环和q轴载荷控制环的控制器参数。
图7-15所示为15m/s风速时,Windey 1.5MW机组的d轴载荷控制环开环伯德图(配置完PID和滤波器参数后),从图可知,d轴载荷控制环具备足够的稳定裕量,稳定性良好。
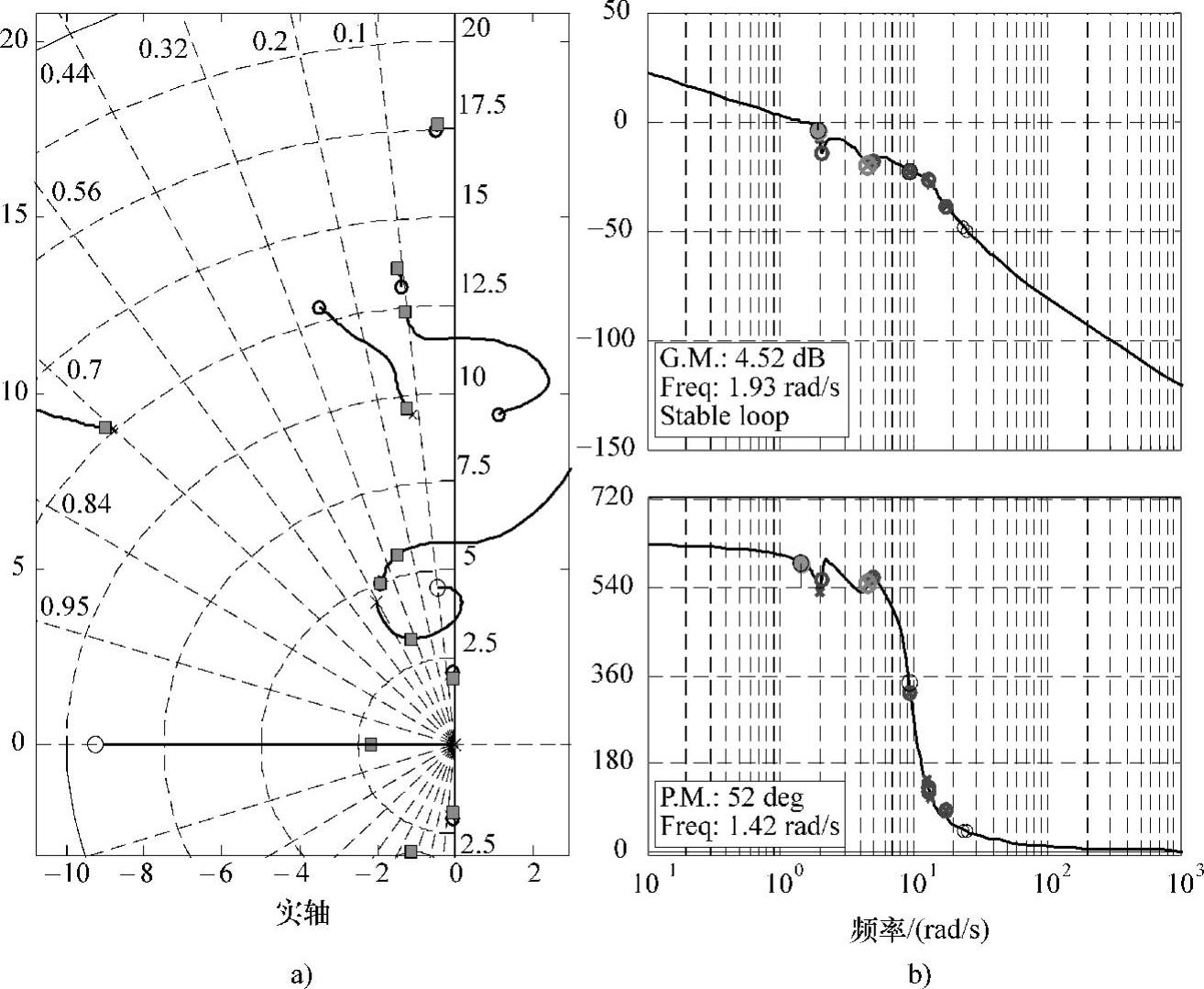
图7-15 d轴载荷控制环的根轨迹图和开环伯德图(风速15m/s)
a)根轨迹图 b)开环伯德图
5.滤波器设计
一般传感器测量出来的信号都需要低通滤波,低通滤波可以减小高频时控制器的响应。另外用凹陷滤波器过波掉不期望响应的频率,如3P等。
二阶低通滤波器拉普拉斯表达式为

式中 ξ——阻尼;
ω——固有频率。
二阶凹陷滤波器拉普拉斯表达式为

式中 ξ1、ξ2——阻尼;
ω1、ω2——固有频率。
6.限幅环节设计
在低于额定风速时,随着风速变小,独立变桨的变化最大幅值逐渐减小,当风速小于一定风速时,不在执行独立变桨控制动作,以减小变桨机构的磨损。因此根据转矩、功率或转速设计独立变桨限幅环节,并以转矩来设计独立变桨限幅环节,其限幅环节表达式为

式中 βmin——独立变桨最小限幅幅值;
βmax——独立变桨最大限幅幅值;
T——当前的发电机转矩(可以用转矩控制环得出的期望转矩);
Tmin——需要独立变桨控制时的发电机最小转矩;
Tmax——发电机额定转矩。
7.相位补偿
于传感器传数据采集、信号传输、控制器信号处理等会导致变桨动作的滞后,根据对变桨系统测试结果,输出时间滞后高达0.1s,这对变桨控制会产生较大影响,需要对输出滞后进行方位角相位补偿,相位补偿公式为
φ0=ωτ (7-49)
式中 ω——风轮转速;
τ——输出滞后时间。
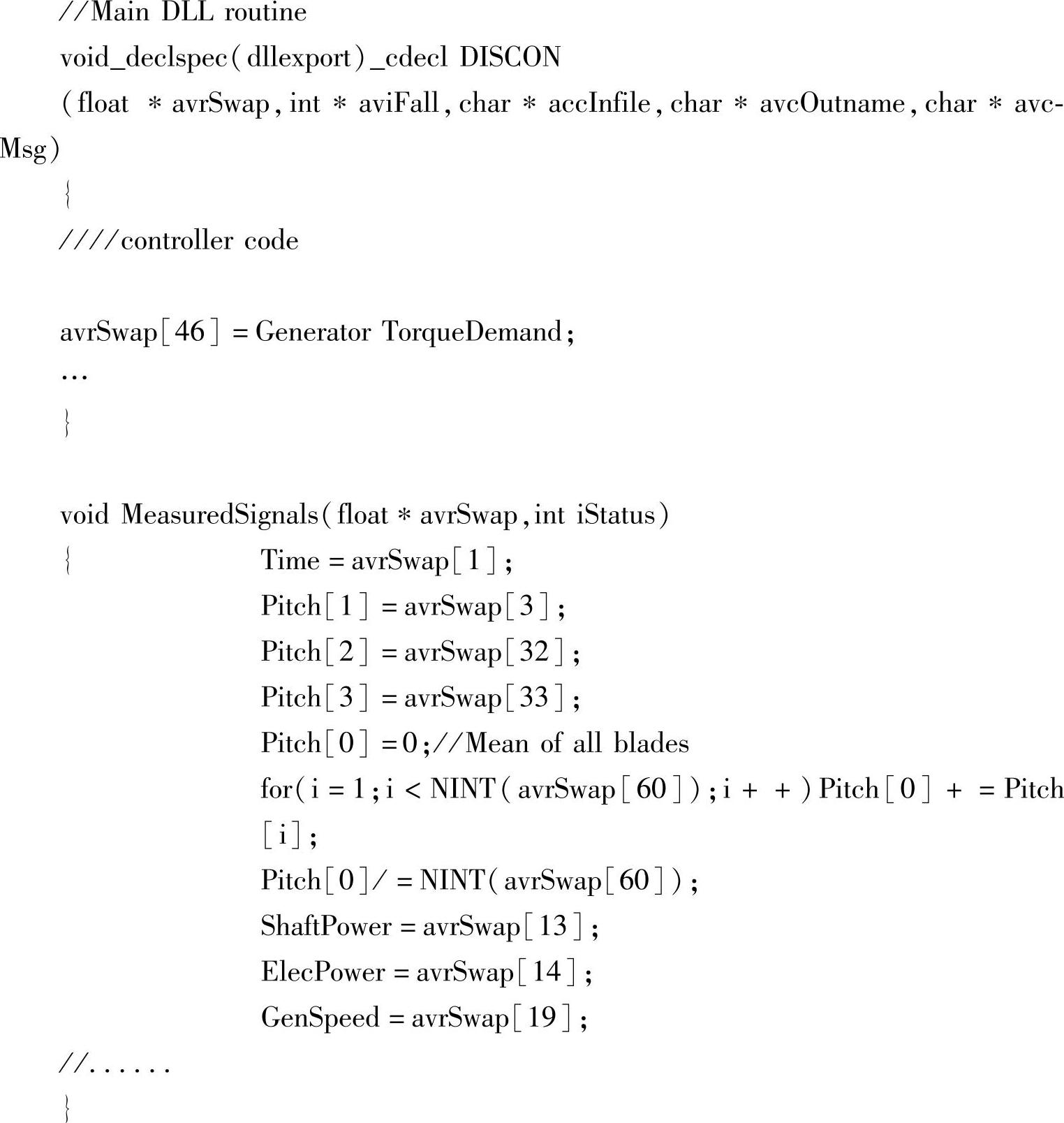
8.外部控制程序编写
根据上述设计思路和整定参数,用VC++完成独立变桨控制程序开发,并编写出两个接口:一个接口,可以编译为bladed软件外部控制器,用于仿真验证独立变桨控制效果及整机载荷计算;另一个接口,可以编译作为真实控制器核心控制算法程序,用于真实现场机组的控制。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。