



1.机器人功能分析
本作品是针对于能在玻璃幕墙、瓷砖等光滑壁面上利用履带式吸盘行进及利用清洗平台进行壁面清洗的壁面清洁智能机器人。机器人在行进过程中,吸附系统可以保证机器人紧贴壁面而不会出现打滑和脱落的现象,同时行进机构可以保证机器人平稳地在壁面上移动,清洁系统在机器人行进的过程中对壁面完成清洗。机器人还能自动识别障碍及玻璃幕墙的边缘,在遇到无法跨越的障碍或作业到幕墙边缘时,转向系统开始工作,使机器人转向,并完成较大范围的幕墙清洗工作。
壁面清洁智能机器人若要完成以上各项预定任务,必须具有以下几项能力:
1)吸附能力:机器人真空吸盘与壁面所产生的摩擦力必须大于自身的重力,保证机器人安全地吸附在壁面上,不会出现打滑和脱落现象。
2)行进能力:机器人需有行进机构,使机器人能自由地行走。
3)识别能力:机器人在幕墙上自由行走时,需要智能识别幕墙的边缘及无法跨越的高障碍物。
4)转向能力:在遇到无法跨越的高障碍物和到达幕墙的边缘时,机器人能在智能识别之后通过转向系统进行转向,不仅能提高机器人的安全性能,也能提高机器人在整个壁面上的清洁效率。
5)工作环境适应能力:机器人所在的工作壁面并不是完美理想的光滑壁面,当工作面上有凸起和沟槽时,机器人要通过这些障碍物,就必须有足够的越障能力。由于爬壁机器人工作壁面的特殊性,移动机构常和吸附机构存在耦合,这给机器人的运动控制带来了一些困难。
2.机器人整体结构
壁面清洁智能机器人的整体设计框图如图11-3所示。该机器人的整体结构主要包括以下几个方面:
1)吸附结构:保证壁面清洁智能机器人在壁面上行进时不会出现打滑和脱落。
2)行进机构:保证壁面清洁智能机器人在壁面上可以自由行进。
3)转向机构:保证壁面清洁智能机器人作业到一定情形时能够转向绕行。
4)识别装置:辅助壁面清洁智能机器人在壁面行进作业时智能识别机器人无法克服的障碍,进而通过转向机构进行转向。
5)清洁机构:保证壁面清洁智能机器人能完成清洗壁面的工作。
3.机器人的吸附机构
(1)吸盘的结构与设计 真空吸盘结构的原理图和示意图分别如图11-4和图11-5所示,它在履带上的安装位置如图11-6所示。吸盘的顶部为橡胶制成的碗状结构,当吸盘行进到前轮时,真空泵的气嘴插入其中并吸气,吸盘的气管里面由橡胶密封球、弹簧组成,吸气形成负压之后,吸盘顶部气孔直接和大气压接触,大气压对密封球形成压力,从而阻止气体进入真空吸盘中,保证吸盘的真空度。吸盘外部有杠杆装置,当吸盘行进到后轮时,利用后轮车架上设计的凸起装置带动杠杆工作,杠杆拉出密封阀,空气进入吸盘,使吸盘不再保持真空,完成吸盘与壁面的脱离。
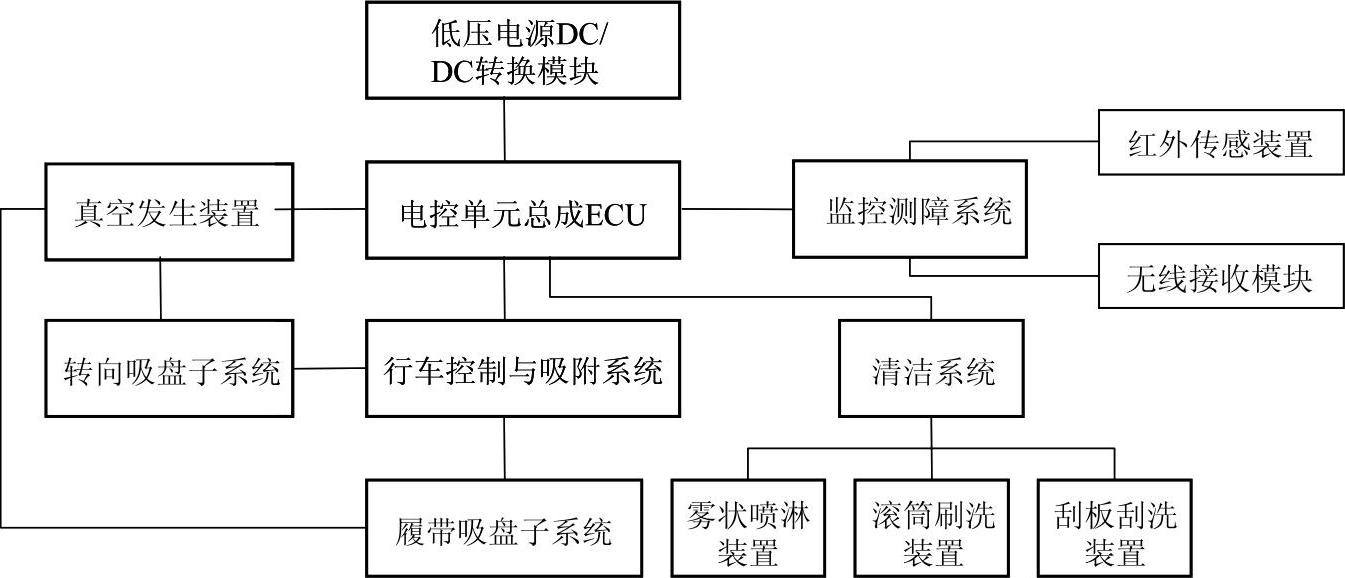
图11-3 壁面清洁智能机器人的整体设计框图
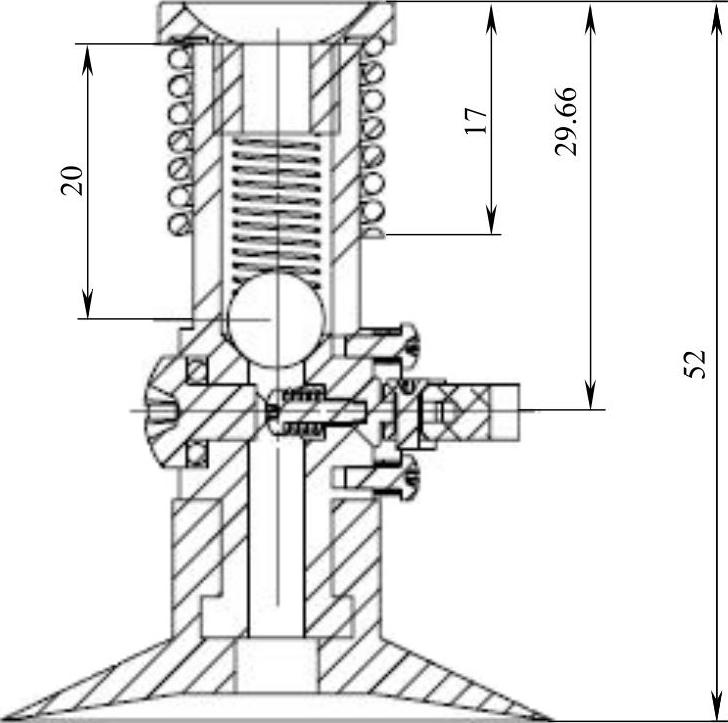
图11-4 真空吸盘原理图
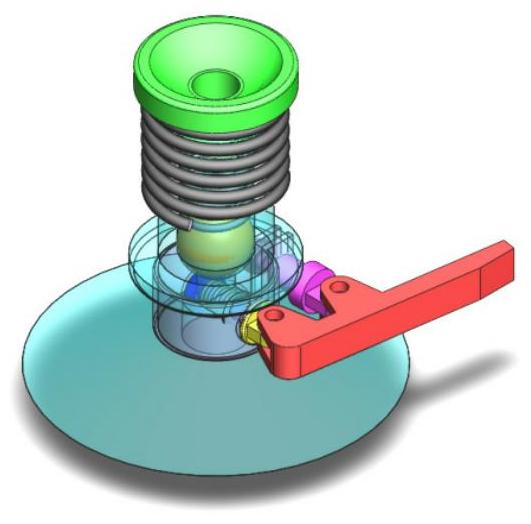
图11-5 真空吸盘示意图
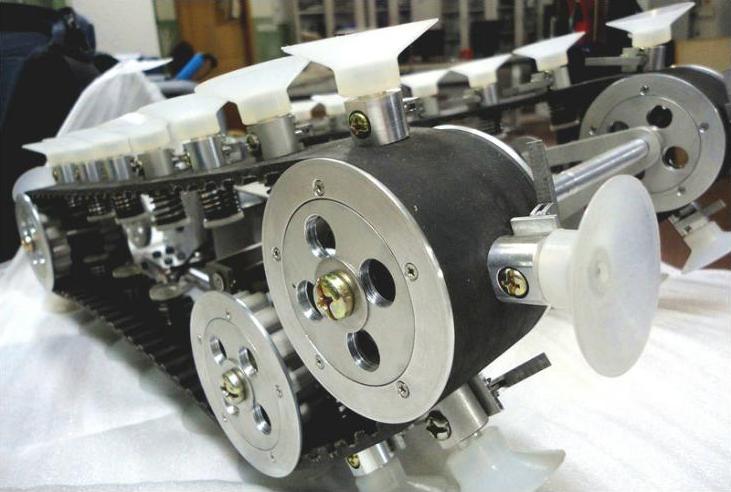
图11-6 吸盘在履带上的安装位置
(2)吸附机构安全性论 证为了确定壁面清洁智能机器人的负载能力和安全性能,对其进行受力分析。当机器人吸附在玻璃壁面上时,受力情况如图11-7所示。
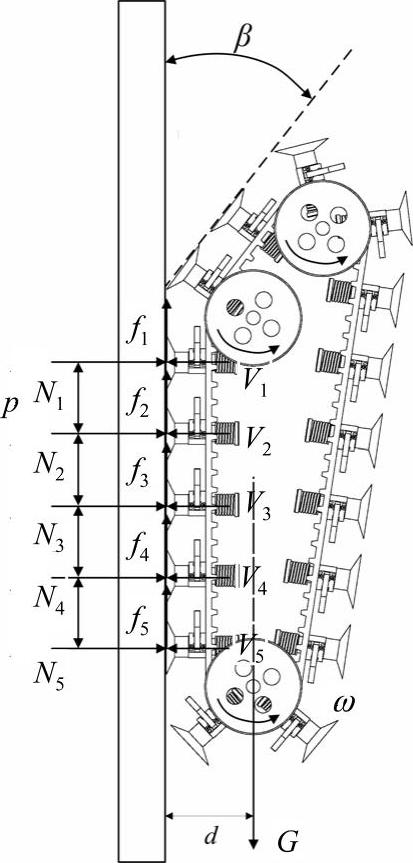
图11-7 机器人吸附受力情况
图11-7中各符号的定义如下:
1)Ni——墙壁对第i组吸盘的法向支撑力(垂直于墙面),i=1,…,5。
2)Vi——作用在第i组吸盘上的真空吸力。
3)fi——墙壁作用在第i个吸盘上的摩擦力。
4)G——机器人的重力(包括外设)。
5)p——相邻两组吸盘之间的距离。
6)d——机器人的等效重心到玻璃壁面的距离。
当壁面清洁智能机器人在玻璃壁面上移动时,有两种危险的情况可能发生:一种情况是它从墙面上滑落;另一种情况是最上方接触的吸盘由于受到的倾翻力矩太大脱离墙面,引起机器人倾翻。设计吸附机构时,应避免滑落和倾翻这两种情况发生。为了简化分析,考虑静态吸附情况。
1)避免机器人从墙面上滑落。根据摩擦力的特性,最大静摩擦力要大于滑动摩擦力,有

2)避免机器人从玻璃幕墙上倾翻。假设作用在支撑轮上的力不予考虑,认为墙壁对机器人的反作用力只作用在与墙壁接触的吸盘上,则静态情况下,机器人在水平和垂直方向上的受力分别满足


所受的平衡力矩为(以机器人的重心为参照点)

假定各个吸盘的真空度是均衡的,则作用在吸盘上的吸力为
V=sΔp (11-5)
为了方便计算作用于吸盘上的支撑力Ni(i=1,…,5),假设从N1到N5比例增加,即
Ni+2-Ni+1=Ni+1-Ni(i=1,2,3) (11-6)
将式(11-2)、式(11-4)、式(11-6)联立,可得

理论上只要满足N1>0,则条件2)满足。由式(11-7)及N1>0,可求得

4.机器人的行进机构
(1)履带的结构与设计 壁面清洁智能机器人的行走机构主要由吸盘组件、履带、履带轮、动力源、传动系统、控制系统等构成。其中履带后轮为主动轮,前部分由前轮和同步轮组成。所设计的履带结构如图11-8所示。采用标准345H 69齿形同步带,履带的前部分为斜面,这样可以防止履带在行进过程中吸盘与壁面出现干涉导致吸盘弯折而无法吸附。
为满足传动关系和同步带的啮合关系,需要对机器人的总体布置设计相关尺寸,并以此为基础设计底盘尺寸。履带定型下的轴件尺寸如图11-9所示。
 (https://www.xing528.com)
(https://www.xing528.com)
图11-8 加工后的标准345H69齿形同步带
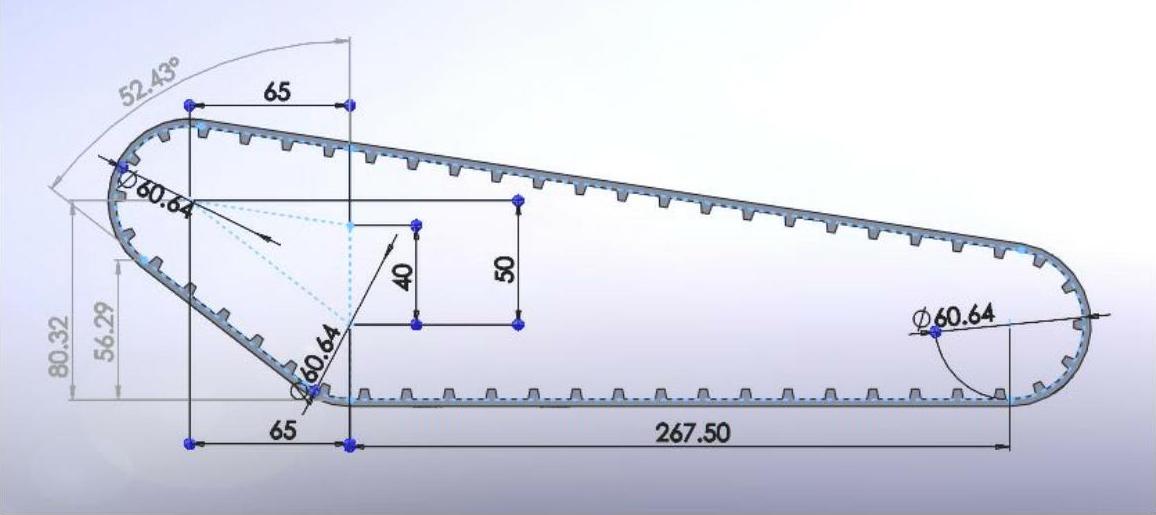
图11-9 履带定型下的轴件尺寸
(2)壁面清洁智能机器人行进能力论证 履带轮驱动履带转动时,根据功率的关系可得
P=Meω=kmgv (11-9)
式中 P——驱动轮传递给履带的功率(W);
Me——主动轮驱动履带的扭矩(N·m);
ω——主动轮转动的角速度(rad/s);
k——安全系数,是为了保证有一定的功率损耗,一般取2~3;
v——机器人在壁面上的行进速度(m/s)。
设在主动轮工作中一个齿上的剪切力为Fs,则有
Fs=Aτ=blτ (11-10)
式中 A——主动轮齿底部的截面积(m2);
τ——主动轮轮齿底部受到的切应力(Pa);
b——主动轮轮齿底部截面的长度(m);
l——主动轮轮齿底部截面的宽度(m);
对主动轮中心取矩,由平衡方程∑M0=0,可得
iFsr=iblτr=Me (11-11)
式中 r——主动轮的半径(mm);
i——处于工作状态的齿数。
对于主动轮的转动有
v=ωr (11-12)
联立式(11-9)、式(11-11)和式(11-12)可得主动轮轮齿底部受到的切应力τ为

5.机器人的吸附系统
(1)履带与吸盘的连接 履带、同步带轮、吸盘的装配关系如图11-10所示。为了避免在履带旋转时吸盘管与履带轮发生干涉,在履带轮的中间设计有一定深度和宽度的沟槽,使机器人在行进时吸盘能够平顺地在履带上运转,并能成功地吸气与放气。履带和吸盘之间采用压簧进行柔性连接,以保证配气机构功能实现时的平顺性与可靠性。
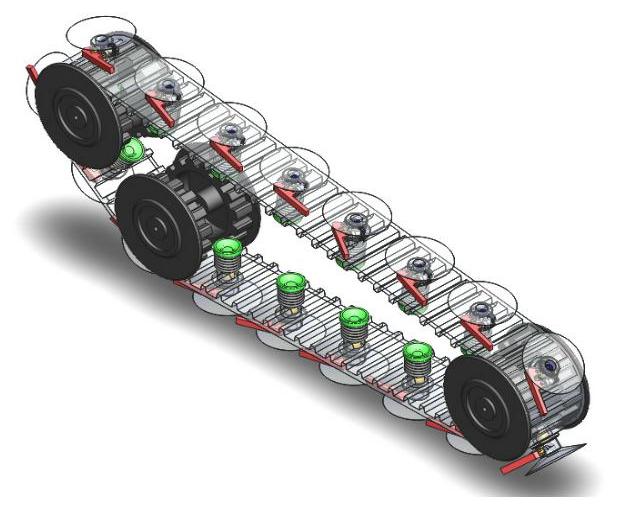
图11-10 履带、同步带轮、吸盘的装配关系
(2)吸附系统的工作过程 配气装置采用凸轮结构,真空泵与履带轮的前轮形成配合,吸气装置配置在前轮。履带轮的后轮为驱动轮,放气装置配置在后轮车架上。当驱动轮转动时,履带通过和履带轮的啮合作用运转,同时履带上面的吸盘伴随着履带运动。图11-11所示的齿轮机构,能满足一定的传动比关系,当每个吸盘转动到气嘴下,齿轮机构可以保证凸轮行径的最高点刚好能推动气嘴向下运动,从而使气嘴与吸盘吸气口连接,借助真空泵完成吸气。当吸盘在履带的带动下转动到后轮时,车架上的凸起装置利用杠杆的作用将吸盘底部的密封气阀打开,使真空吸盘与大气之间贯通,从而使空气进入吸盘中,完成“放气”的过程,使吸盘不再有真空度,与壁面脱离。吸盘在履带上的如此往复作业,保证了机器人的吸附和行进。
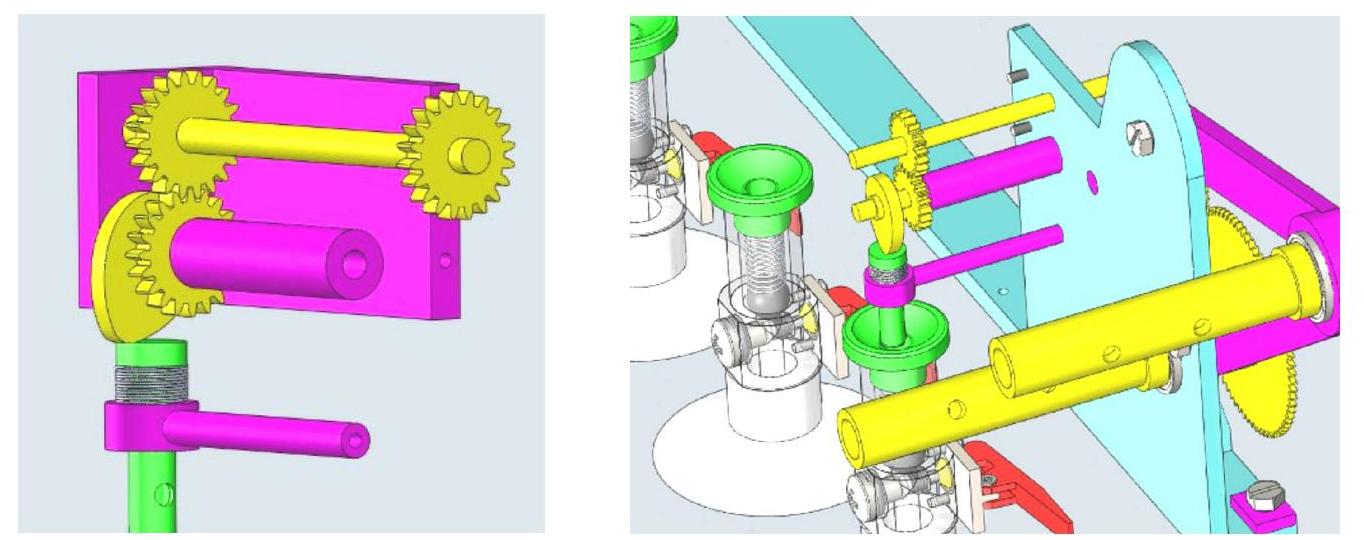
图11-11 真空泵与前轮形成配合的齿轮和凸轮机构
6.机器人的转向系统
(1)转向系统的结构与设计 车体的转向系统主要由中央大吸盘、丝杠、齿轮及蜗轮蜗杆电动机等组成。由于中央大吸盘在整个转向过程中起着至关重要的作用,在这里主要介绍中央大吸盘的结构及大吸盘在车体转向时的整个作业过程。
中央大吸盘的模型与装配图如图11-12所示,其主要结构与位于履带上面吸盘的结构基本相同。吸气管设计在吸盘的侧面,而吸盘顶部则与车体底盘上面的丝杠、螺母等装置连接。中央大吸盘与履带吸盘在吸气过程中采用同一个真空泵,但是采用不同的气动回路。
中央大吸盘的电动机采用蜗轮蜗杆式传动装置,能够提供强大的扭矩,并具有自锁的性质,能够保证吸盘在完成转向、电动机停止工作后不会因重力矩作用而出现翻转或摆动等情况。转向装置与电动机的装配关系如图11-13所示。
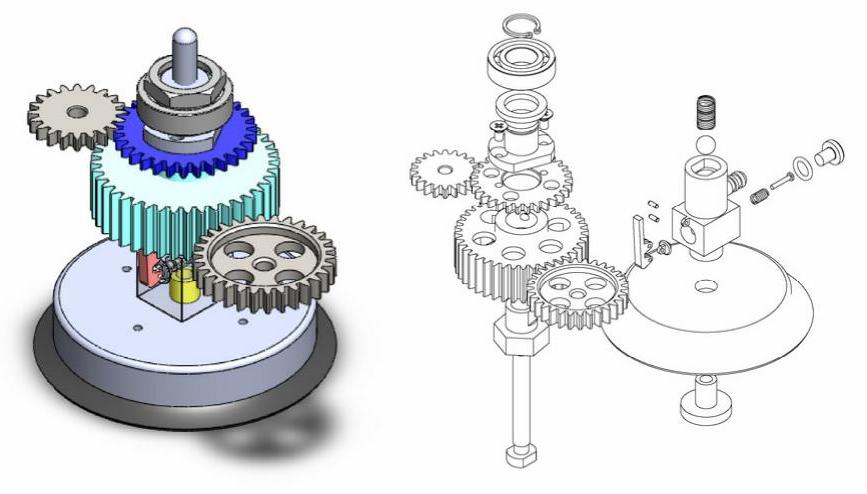
图11-12 车体底盘中央大吸盘的模型与装配图
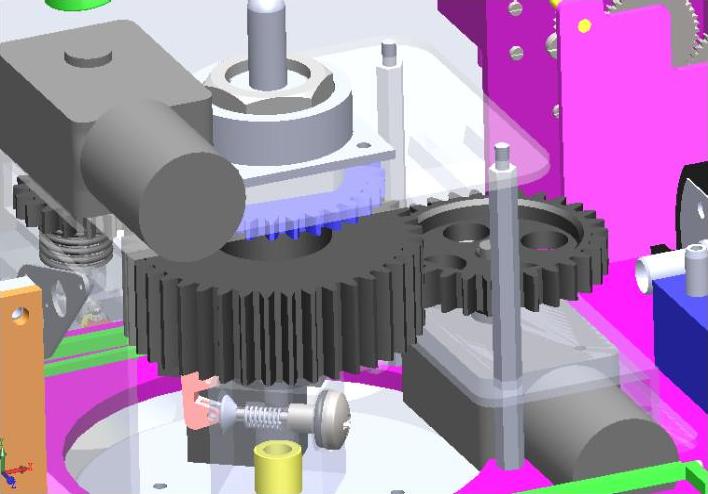
图11-13 转向装置与电动机的装配关系图
(2)转向系统的工作过程 壁面清洁智能机器人的转向流程如图11-14所示。当机器人在行进过程中通过智能识别装置得到需要转向的命令时,驱动轮停止运行,机器人在原地紧贴壁面吸附不动。中央大吸盘的气动回路打开,真空泵作用于中央大吸盘并持续吸气,当中央大吸盘单独所产生的作用足够使机器人紧贴壁面不滑动时,通过电控装置使两边履带吸盘的杠杆工作放气,履带吸盘与壁面脱落。车体在中央齿轮的运行下以大吸盘为中心轴开始转向,转向完成后车体在丝杠的旋转作用下向壁面做垂直运动,履带吸盘同时伴随车体的运动而紧压壁面进而完成自身的被动吸气过程。待所有履带吸盘吸附壁面完成之后,中央大吸盘的气动回路关闭,利用中央大吸盘的杠杆装置完成“放气”过程,最后丝杠旋转,中央大吸盘回升到车体底盘。往复循环,车体便能在壁面上自由地转向与行进。
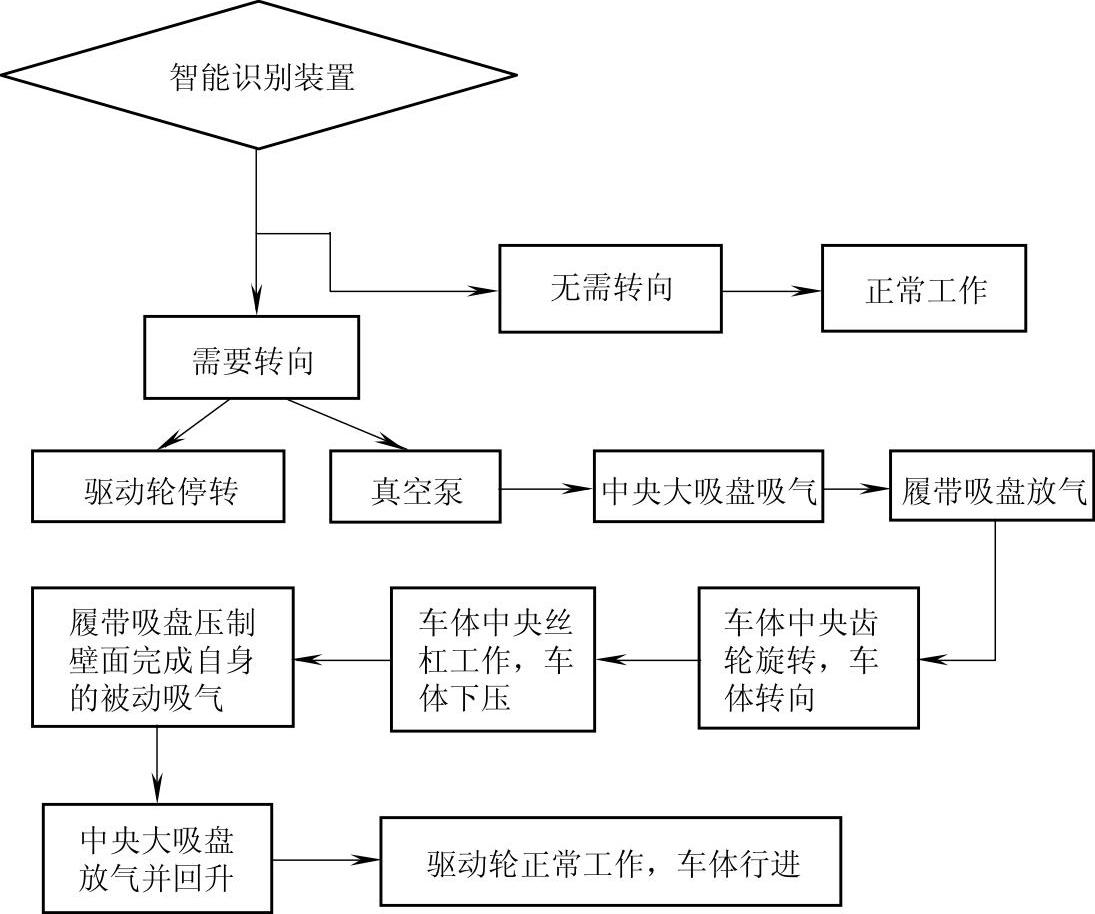
图11-14 壁面清洁智能机器人的转向流程
7.机器人的清洁系统
在壁面清洁智能机器人行进的过程中,安装在车体上面的清洁系统同时进行作业。清洁系统包括雾状喷淋装置、滚筒刷洗装置和刮板刮洗装置。刮板与滚刷实物如图11-15所示。

图11-15 刮板与滚刷实物
该壁面清洁智能机器人采用冲洗、刷洗、刮洗联合作业的清洗方式,具体的清洗过程为:清洁液由水泵喷出,首先冲洗并浸润壁面;随后由滚刷刷洗壁面,除去附着力较大的污垢;最后,由刮水板刮净残留的液体。在清洗的同时,电动机带动履带转动实现行进。清洁装置前置,有利于死角的清洁,清洗效率较高。滚刷安装在车体的前方,而刮板安装在车尾,这样有利于对履带行进之后造成的痕迹和残留的污渍进一步清理,可尽量减少由于履带行进对幕墙造成的污染,使幕墙更清洁。
8.机器人的整体装配
将吸附机构、行进机构、转向机构及清洁机构等子系统组装到一起,就构成了壁面清洁智能机器人的整体结构,整体装配图如图11-16所示,三维模型如图11-17所示。
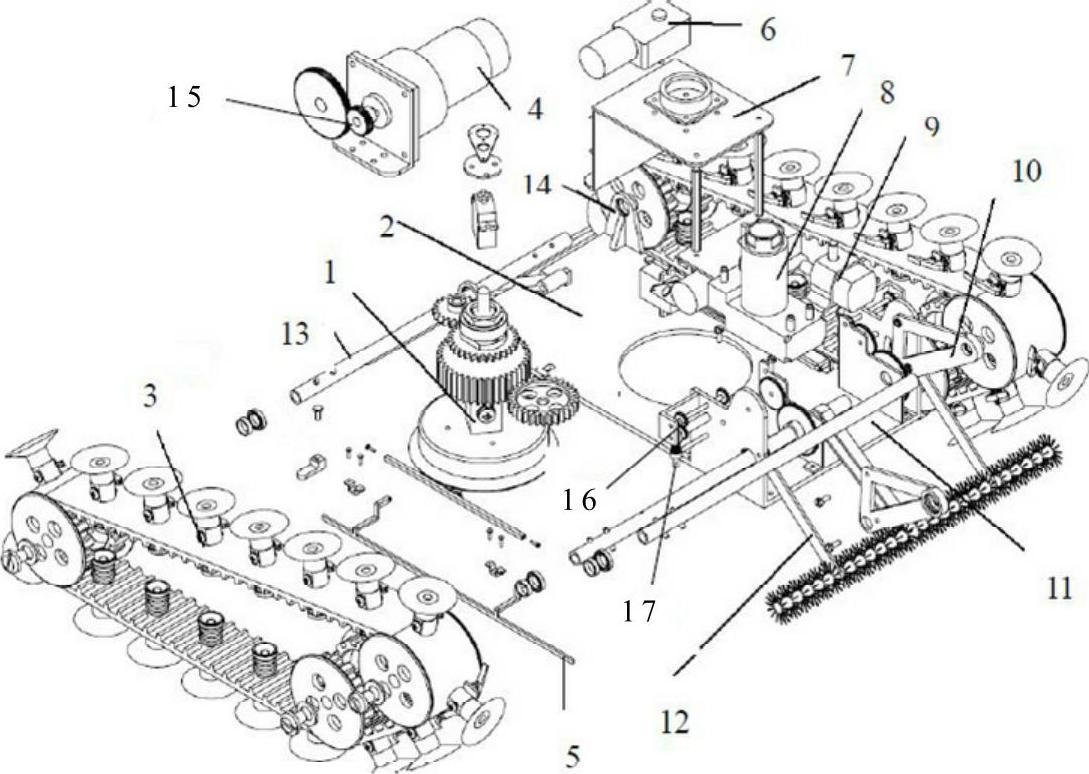
图11-16 壁面清洁智能机器人的整体装配图
1—转向机构 2—底盘 3—同步带 4—主驱动电动机 5—杠杆触发装置 6—转向舵机 7—承托架 8—真空泵 9—真空泵驱动电动机 10—三角架 11—连接轴 12—滚刷支架 13—驱动轴 14—支撑架 15—驱动齿轮副 16—配气齿轮组 17—凸轮机构
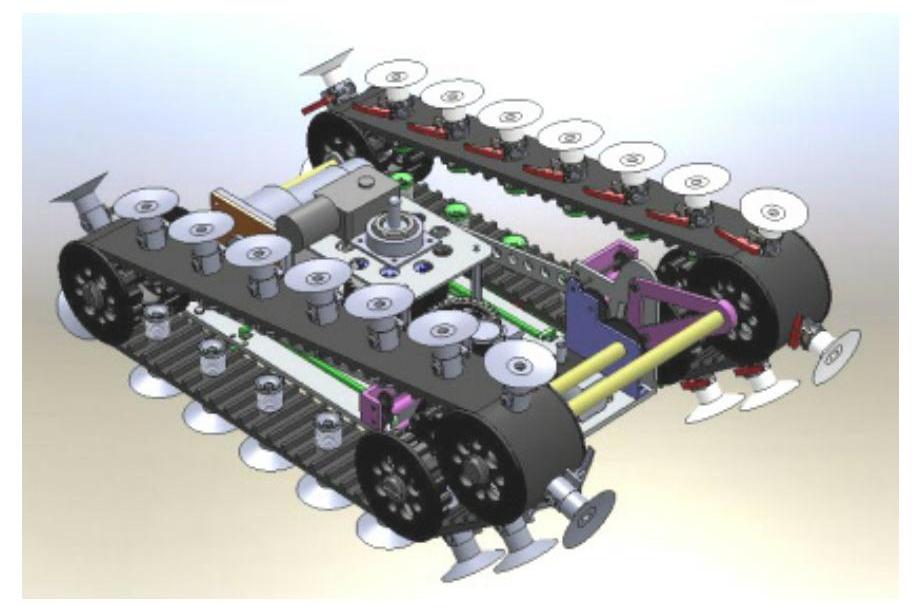
图11-17 壁面清洁智能机器人的三维模型
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。