



仿人机器人的研究开始于20世纪60年代末,至今已有四十多年的历史。如今,仿人机器人已经成为机器人技术领域里的主要研究方向之一。
1968年,美国通用电气公司的研究人员试制了一台名叫Rig的操纵型二足步行机构,从而揭开了仿人机器人研究的序幕。1973年,日本的加藤一郎从工程角度研制出世界上第一台真正意义上的仿人机器人WABOT-1,如图9-1所示。WABOT-1可用日语与人交流,实现静态行走,并可依据命令移动身体去抓取物体。1984年,加藤实验室又研制出了采用踝关节力矩控制的WL-10RD型仿人机器人,如图9-2所示。该机器人实现了步幅40cm,每步1.5s的平稳动态步行。1986年,加藤实验室再次研制成功了WL-12(R)型步行机器人,该机器人通过躯体运动来补偿下肢的任意运动,在躯体的平衡作用下,实现了步行周期1.3s,步幅30cm的平地动态步行。

图9-1 WABOT-1仿人机器人
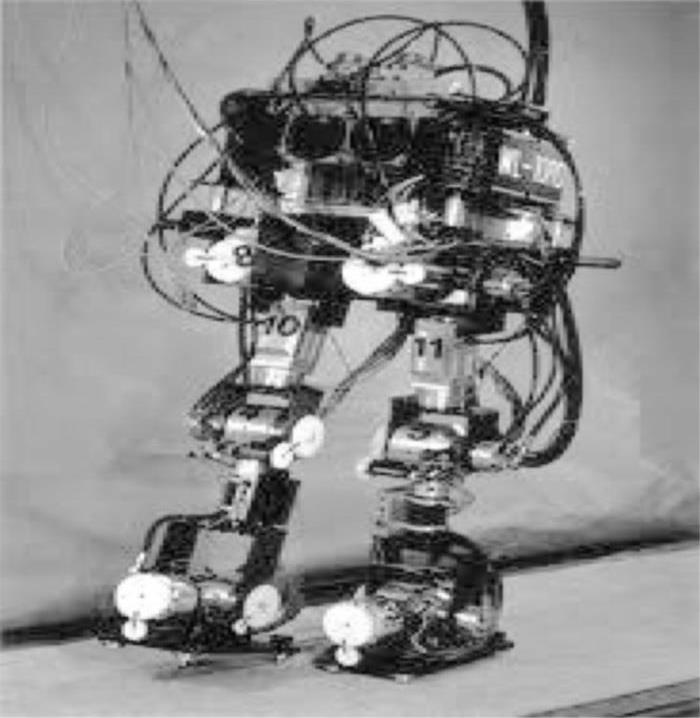
图9-2 WL-10RD型仿人机器人
日本还有许多著名的大公司如本田、索尼、松下电工、富士通、川琦重工、法那科、日立等也正在从事仿人机器人的研究与开发,并取得了突破性的成就。本田公司从1986年至今,已经推出了3种P系列仿人机器人。P1是本田公司最初研制的步行机器人,主要是对二足步行机器人进行基础性的研究工作。P2是1996年12月推出的步行机器人,相对于P1而言,P2更加类人化。P2的问世将二足步行机器人的研究推向了高潮,使本田公司在此领域里处于世界绝对领先地位。1997年12月,本田公司又推出了P3,如图9-3所示。P3使用了新型的镁材料,实现了小型轻量化。2000年11月,本田公司又推出了新型双脚步行机器人ASIMO,如图9-4所示。ASIMO与P3相比,其形体更容易适应人类的生活空间,通过提高双脚步行技术,其步态更接近人类的步行方式。ASIMO使用个人计算机和便携式设备控制步行方向、关节及手的动作,二足步行采用了新开发的技术,可以更加自由地步行。P3和ASIMO的推出,将仿人机器人的研究工作推上了一个新的台阶,使仿人机器人的研制和生产正式走向实用化、工程化和市场化。
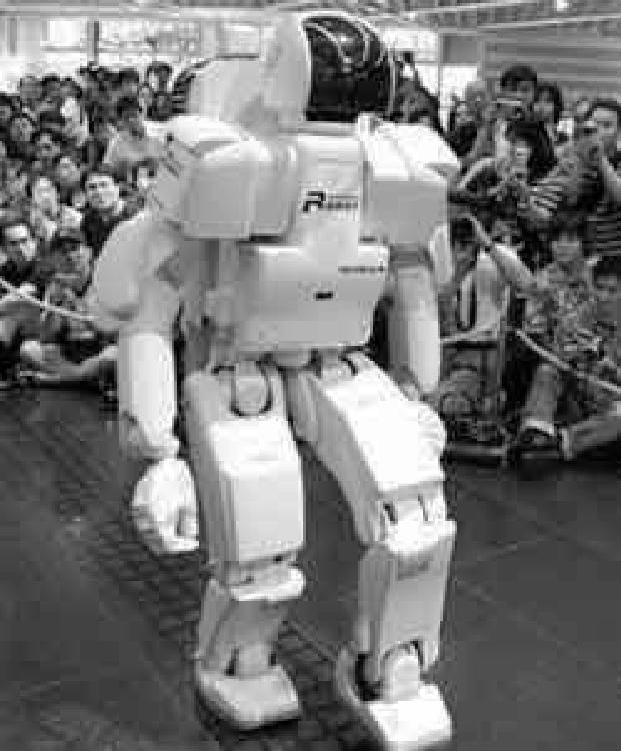
图9-3 P3仿人机器人
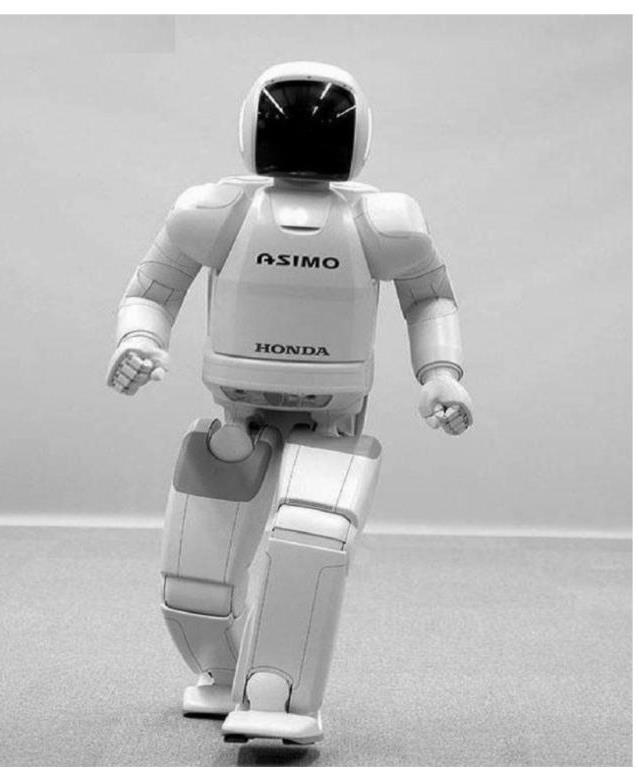
图9-4 ASIMO仿人机器人
索尼公司于2000年11月也推出了娱乐型仿人机器人SDR-3X,如图9-5所示。它可以按照音乐节拍翩翩起舞,并且进行较高速度的自律运动。SDR-3X还配备有声音识别和图像识别功能。索尼公司于2003年11月又推出世界上首台会跑的仿人机器人QRIO,如图9-6所示,实现了搭载控制系统和电源系统的跑动。QRIO共配置24个驱动装置,通过两个64位RISC微处理器对它们进行实时控制。

图9-5 SDR-3X仿人机器人

图9-6 QRIO仿人机器人(https://www.xing528.com)

图9-7 麻省理工学院设计的Cog仿人机器人
1990年,美国俄亥俄州大学提出用神经网络来实现双足步行机器人的动态步行,并在SD-1型二足步行机器人中得以实现。麻省理工学院在Spring Turkey和Spring Flamingo仿人机器人的控制中提出了虚模型控制策略。从本质上说,虚模型控制实际上是一种运动控制语言,即假想将诸如弹簧振子、阻尼器等元件固连在仿人机器人的系统中,用来产生假想的驱动力矩。采用虚模型控制,可以有效地避免繁琐的机器人逆运动学和动力学的计算。美国麻省理工学院开发的Cog机器人只有上身,没有下肢,主要作为研究机器人的头脑智能、认知与感知、手臂的灵活性及柔顺性等的平台,如图9-7所示。美国佛罗里达大学的机器智能实验室开发了仿人机器人Pneuman,作为人工认知、自然语言处理、轨迹规划、自动导航、人与机器人交互的研究平台。Sabourin等在无参考轨迹的条件下,使用数学方程的分析方法来描述和预测仿人机器人Rabbit的运动,仅仅通过控制施加在二足步行机器人摆动腿髋部的力矩脉冲,实现了主动行走和被动行走交替进行的连续过程。2005年4月20日,二足步行机器人Rabbit向世人展示了它的奔跑能力,如图9-8所示。
相比国外而言,我国从20世纪80年代中期才开始研究双足步行机器人。国防科技大学在1988~1995年间,先后研制成功平面型六自由度双足机器人KDW-Ⅰ、空间运动型机器人KDW-Ⅱ和KDW-Ⅲ。KDW-Ⅲ下肢有12个自由度,最大步距为40cm,步速为4s/步,可实现前进/后退和上/下台阶的静/动态步行和转弯运动。2000年11月29日,国防科技大学又研制出我国第一台类人型双足步行机器人“先行者”(见图9-9),高1.4m,重量20kg,可实现前进/后退、左/右侧行、左/右转弯和手臂前后摆动等各种基本步态,行走频率为2步/s,能平地静态步行和动态步行。
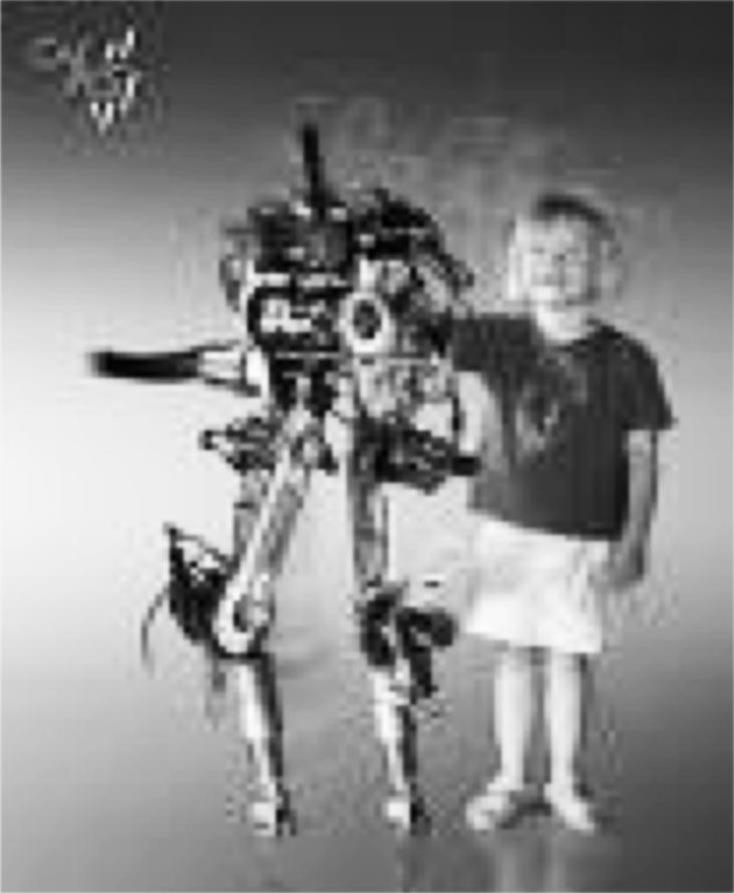
图9-8 二足步行机器人Rabbit
图9-9 “先行者”仿人机器人

图9-10 BRH-1仿人机器人

图9-11 THBIP-Ⅰ仿人机器人
哈尔滨工业大学于1985~2000年研制出二足步行机器人HIT-Ⅰ、HIT-Ⅱ和HIT-Ⅲ。其中,HIT-Ⅲ实现了步距200mm的静态/动态步行,最快步行周期为3.2~4.0s/步,能够完成前/后、侧行、转弯、上下台阶及上斜坡等动作。上海交通大学于1999年研制的仿人形机器人SFHR,腿部和手臂分别有12个自由度和10个自由度,身上有2个自由度,共24个自由度,实现了周期3.5s、步长10cm的步行运动。该机器人本体上装有两个单轴陀螺和一个三轴倾斜计,用于检测机器人的姿态信息,并配备了富士通公司的主动视觉系统,是研究通用机器人学、多传感器集成以及控制算法良好的实验平台。北京理工大学于2002年12月研制出仿人机器人BRH-1(见图9-10),高158cm,重量76kg,有32个自由度,步幅0.33m,行动速度为1km/h,能够根据自身的力觉和平衡觉等感知自身的平衡状态和地面高度的变化,实现在未知地面的稳定行走和表演太极拳动作。此后,又在此基础上研制成了“汇童”机器人,它高160cm,重量63kg,是具有视觉、语音对话、力觉、平衡觉等功能的拟人机器人。“汇童”的成功研制标志着我国在拟人机器人的研制方面取得了突破性进展,是继日本之后第二个掌握集机构、控制、传感器、电源于一体的国家。清华大学于2002年研制出具有自主知识产权的仿人机器人THBIP-Ⅰ(见图9-11)样机。THBIP-Ⅰ共32个自由度,采用独特传动结构,成功实现无缆连续稳定地平地行走、连续上/下台阶行走以及端水、太极拳和点头等动作。其平地行走速度为4.2m/min,步距为0.35m,跨越台阶高度75mm,跨越速度20s/步。该机器人在仿人机器人机构学、动力学及步态规划、稳定行走理论、非完整动态系统控制理论与方法,以及总线通信、嵌入式系统、微电动机驱动、自载电源、环境感知技术等方面取得了一些创新成果和突破性进展。
尽管仿人机器人的研究取得了巨大的成就,但是目前仿人机器人的功能距离人的期望仍然很远,仿人机器人的研究还有巨大的潜力。下面将按照眼、手、足、脑的顺序,分别介绍仿人机器人各个重要组成部分的研究成果、基本原理和关键技术问题。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。