



作为柔性机构可靠性分析的基础,多体系统动力学(Multibody Systems Dynamics)为一般力学的一个分支,是20世纪60年代在人类早期航天活动时期诞生的一门关于机构位形描述、建模、计算和仿真的学科,其早期的研究对象是小变形、刚体假设的多刚体系统。多刚体系统动力学(Rigid Multibody Dynam-ics)是在最初航空、航天上的机构系统结构比较简单,部件的柔性较小的情况下逐渐发展起来的,刚体假设在应用于小变形弹性体的计算上所取得的近似结果比较令人满意。
多刚体系统动力学开创性研究的标志是Fletcher等学者在1963发表的论文,Fletcher等建立了重力定向卫星的两个刚体组成的多体系统模型[1],在20世纪70年代初,美国学者Likins采用混合坐标方法研究了带有柔性附件卫星的动力学问题[2,3],是多柔体系统建模理论和方法的奠基性研究。以国际理论与应用力学学会(IUTAM)、北大西洋公约组织与美国国家基金委员会(NATO-NSF-ARD)以及国际机器及机构理论联合会(IFTOMM)召开的关于多体系统动力学的一系列有广泛影响的学术会议为里程碑和阶段性标志,多体系统动力学经过50多年的研究,逐步从多刚体系统动力学过渡到柔性多体系统动力学,并在建模、计算和仿真等方面日趋成熟[4-9]。上述学术会议总结了当时的研究进展,提出了多体系统动力学未来的研究热点和发展方向。多体系统动力学的研究成果对分析和解决人类航天活动中出现的机构故障起到了重要作用,同时也为柔性机构动态可靠性分析与设计的研究奠定了基础。
尽管多体系统动力学取得了令人瞩目的成就,然而缺乏系统的机构可靠性分析理论和设计方法的指导,实物仿真实验费用昂贵,而且无法全面地模拟真实的使用环境,令机构生产制造中缺少可靠性设计、可靠性分析和可靠性管理,出现了多起因为机械故障导致航空器和航天器的失败实例[10,11]。
较早的失败实例是1958年美国发射的第一颗人造地球卫星“探险者一号”,在卫星入轨后,星体外部四根鞭状天线在展开过程中产生的弹性振动使得卫星姿态失稳,导致卫星翻滚、失控,其主要原因是应用刚体假设进行计算,忽略了天线的弹性振动和弹性变形所引起的卫星内能耗散。
1963年3月16日,美国宇航员阿姆斯特朗与斯科特在乘坐“双子星座-8”号飞船执行与目标飞行器“阿金纳”交会对接的任务时,因一枚反推火箭发生故障,两个航天器一同翻滚、失控。
1978年,美国“陆地卫星-2”因偏航飞轮机构失效,整星失败。1979年,日本广播卫星因飞轮机构停转导致卫星提前报废。
1982年,美国“陆地卫星-4”观测仪的旋转部件受到柔性太阳能帆板驱动系统的干扰而产生微小扰动,降低了图像质量。“国际通讯卫星V号”柔性太阳能帆板扭转频率与驱动系统发生谐振,导致太阳能帆板停转、打滑。加拿大、德国、印度也先后出现过柔性太阳能帆板不能正常展开的故障。
1990年发射入轨的哈勃望远镜曾经因太阳能帆板连接存在间隙,在“昼夜”温度循环的共同影响下,导致太阳能帆板出现卡滞-滑动的周期性运动,不能精确定位。
由于前苏联解体,导致航天人才流失、科研经费不足、科研管理涣散,俄罗斯出现很多次航天发射失败。2001年7月,俄罗斯进行太阳帆飞船试验过程中,因航天器未能与火箭分离以失败告终。2011年仅仅一年期间,俄罗斯就有5次航天探索以失败告终,其可靠性研究和可靠性管理工作亟待提高,以满足新的、更加艰巨的科研要求。
我国在航天探索的过程中,也经历了多起惨痛的教训,其中就包括卫星与火箭分离过程中出现的故障,导致卫星不能正常入轨,无法准确定点或者自旋速度不稳定等卫星姿态失效现象,最终导致卫星无法正常工作。“风云一号”卫星为了获得星载机构的高可靠度,不得不使用寿命很短的机构以保证整星的发射成功。2008年10月,“鑫诺二号”由于定点过程中出现技术故障,导致太阳帆板未能二次展开,卫星无法正常工作。2011年由于“长征二号丙”火箭发射失利,而推迟了“天宫一号”和“神舟八号”的发射。(https://www.xing528.com)
除了在航天领域内出现柔性机构的故障之外,在其他应用领域内也同样出现了柔性机构的故障,例如:高速精密加工机床由于传动轴转速加快导致零件加工误差增大;高速车辆的悬架系统和操纵系统高速运行情况下出现稳定性和平顺性劣化的现象;机器人的高速柔性机械臂运动轨迹异常;自行式火炮和装甲车等机动武器系统出现命中率下降等现象。柔性机构故障导致重大损失的惨痛教训,使人们充分认识到在广泛应用柔性机构的同时进行可靠性分析和设计的必要性。
然而,为了降低成本、减轻自重、增加有效载荷,航天器、航空器、机器人及其他各类机构系统不断向轻质、柔性、高速、精密和复杂的方向发展。在高速、大柔性的情况下,在机构系统运动存在两种运动形式:一种是柔性构件的变形运动,又称为快变的弹性振动;另一种是构件的刚性运动,又称为慢变的刚体移动。这两种运动同时出现,互相耦合,使机构的运动性态为高度非线性[12]。一方面,机构速度的提高和构件柔性的增大,导致构件在惯性力作用下的变形加大,使机构真实运动与期望运动之间产生误差;另一方面,速度的提高使激振力的频率提高,而构件柔性的增大使系统的固有频率下降,导致激振力频率和固有频率接近,加大了振动的幅度,也增大了发生谐振的危险,从而引起过大的动态应力。
随着功能日趋复杂、精密的柔性机构在航空、航天、机器人等领域的广泛应用,多刚体系统动力学的计算误差已经无法满足运动精度的要求,需要迫切解决柔性机构的运动耦合问题。较早用于处理柔性机构动力学问题的方法是运动弹性动力学方法(Kineto-Elasto Dynamics,简称KED),KED方法主要采用“瞬时结构假定”,不考虑构件的柔性变形对其大范围运动的影响,通过多刚体系统动力学分析得到构件运动性态,然后考虑构件的惯性特性,以惯性力的形式加到构件上,根据惯性力和系统外力进行柔性变形和强度分析。KED方法的实质是将变形运动和刚性运动的耦合动力学问题转化为多刚体系统动力学和结构动力学的简单叠加,并没有考虑两种运动之间的耦合,KED方法适用于机构速度较低、构件的柔性较小的情况[13]。但是随着航空、航天技术的发展,机构系统向着轻质和柔性等方面发展,KED方法的计算误差越来越大,已经不符合含有柔性体的复杂机构系统。另外,随着机构系统运动速度的加快,运动耦合的程度逐渐加强,非线性程度也逐渐增大。柔性机构运动分析的高精度和高可靠性要求,使KED方法无法全面满足现代机构的设计和分析。在这种情况下,柔性多体系统动力学(Flexible Multibody Dynamics,简称FMD)在应用力学领域和机构学领域应运而生。柔性多体系统动力学方法是在多刚体系统动力学的基础上,重点解决柔性体位形描述、耦合运动建模以及微分代数方程(Differential-Algebraic Equations,简称DAEs)的求解精度等问题。柔性多体系统动力学对航空、航天和机器人等领域机械系统的动态设计起到了重大的推动作用,是解决运动耦合问题的有效方法[14]。
柔性多体系统动力学在建模、计算和仿真等方面的逐渐成熟以及航空、航天和机器人领域内柔性机构的大量应用,使得柔性机构动态可靠性分析的研究成为柔性多体系统动力学在实际应用中的自然延伸。同时,柔性机构所应用的主要领域对机构运动高精度要求和高可靠性要求使柔性机构动态可靠性分析和设计的研究成为当务之急。在人类的航天活动中,出现了多起由于机构故障导致造价昂贵的航天器失效的重大损失,惨痛的教训也迫切需要进行柔性机构动态可靠性分析和设计的研究。
进入21世纪以来,我国在柔性机构主要应用领域陆续展开了多项大型科技活动,取得了举世瞩目的成就。随着“神舟”系列飞船、“天宫一号”、“嫦娥”探月工程、“北斗”系列卫星的成功,我国将会进行更加广阔的深空探测实践,同时也为柔性机构的应用带来挑战和机遇。
柔性机构动态可靠性分析研究的任务就是在多体系统动力学的基础上,结合概率论及数理统计、随机过程理论、机构学、可靠性工程、自动控制、优化设计和系统仿真等多学科进行交叉综合,提出柔性机构动态可靠性分析理论方法,建立柔性机构动态可靠性分析模型并进行基于动态可靠性的柔性机构优化设计,实现柔性机构的动态设计、可靠性设计、优化设计的相互结合,发展机构设计的新理论和新方法,如图1-1所示。
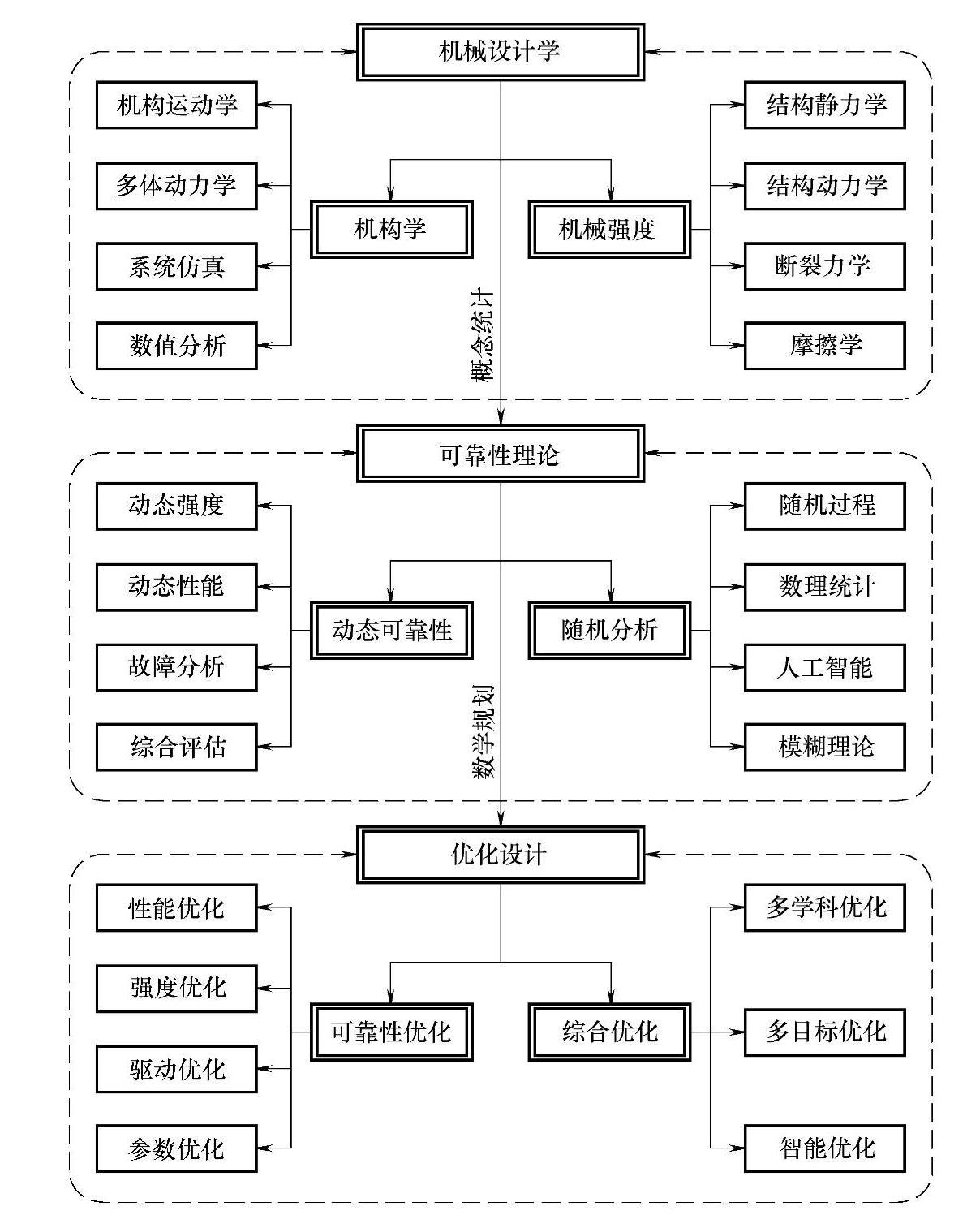
图1-1 柔性机构动态可靠性研究的学科体系
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。