



(1)人工神经网络概述 人工神经网络简称为神经网络,它是一种模仿动物神经网络的行为特征,进行分布式并行信息处理的算法数学模型。它以对大脑的生理研究成果为基础,依靠系统的复杂程度,通过调整内部大量节点之间相互连接的关系,模拟大脑的某些机理与机制,实现一些特定的功能,从而达到处理信息的目的。目前,人工神经网络已应用于很多领域,在闪光对焊过程中,人工神经网络主要应用于控制算法、接头质量检测与预测等方面。
1)人工神经网络处理单元。人工神经元是人工神经网络操作的基本信息处理单位,人工神经元模型如图4-2所示,它是人工神经网络的设计基础。
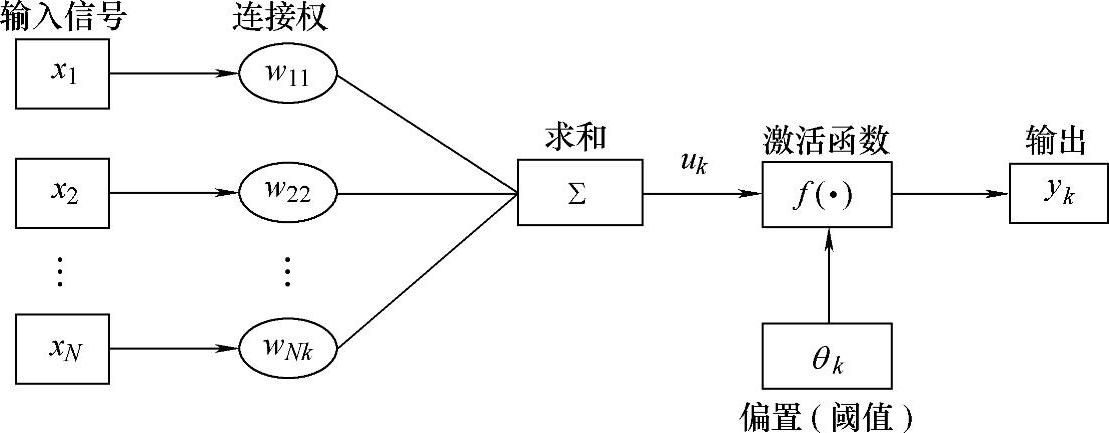
图4-2 人工神经元模型
在人工神经元模型中,各符号表示的意义如下:
①xi表示来自外部的输入信号,或是来自别的处理单元输出的输入信号,在数学上表示为行向量xi(i=1,…,N),其中xi为第i个输入的激励电平,N表示输入数目。
②wik(i=1,…,N;k=1,…,N)表示从结点i(或第i个输入点)到结点k的加权,或称i与k结点之间的连接强度。wik取正值时表示激发状态,wik取负值时表示抑制状态。③  是用于求输入信号对神经元突触的相应加权之和的一个加法器。④uk为输入信号线性组合器的输出。
是用于求输入信号对神经元突触的相应加权之和的一个加法器。④uk为输入信号线性组合器的输出。
⑤f(·)为激励函数,也称转移函数、传输函数或限幅函数,其作用就是将可能的无限域变换到一指定有限范围内输出,这类似于生物神经元具有的非线性转移特性。
⑥θk是一个神经元模型的外部偏置(阀值),其作用是根据阀值为正或为负,相应的增加或降低激活函数的网络输入。
⑦yk为神经元输出信号。一个人工神经元k可以用下列公式表示:

常用的激活函数有线性函数、斜坡函数、阶跃函数、符号函数、Sigmoid函数、双曲正切函数。
2)神经网络的结构及工作方式。单个的神经元可以处理简单的事件,复杂的事件则需要多个神经网络单元连接成网络。将一个神经元的输出送到另一个神经元作为输入信息即为“连接”,每个连接通路对应一个连接权系数,不同的连接方式连接相同的神经元将会得到不同特性的神经网络。根据神经元的拓扑结构形式不同,神经网络可分成层次型神经网络和互联型神经网络两大类。
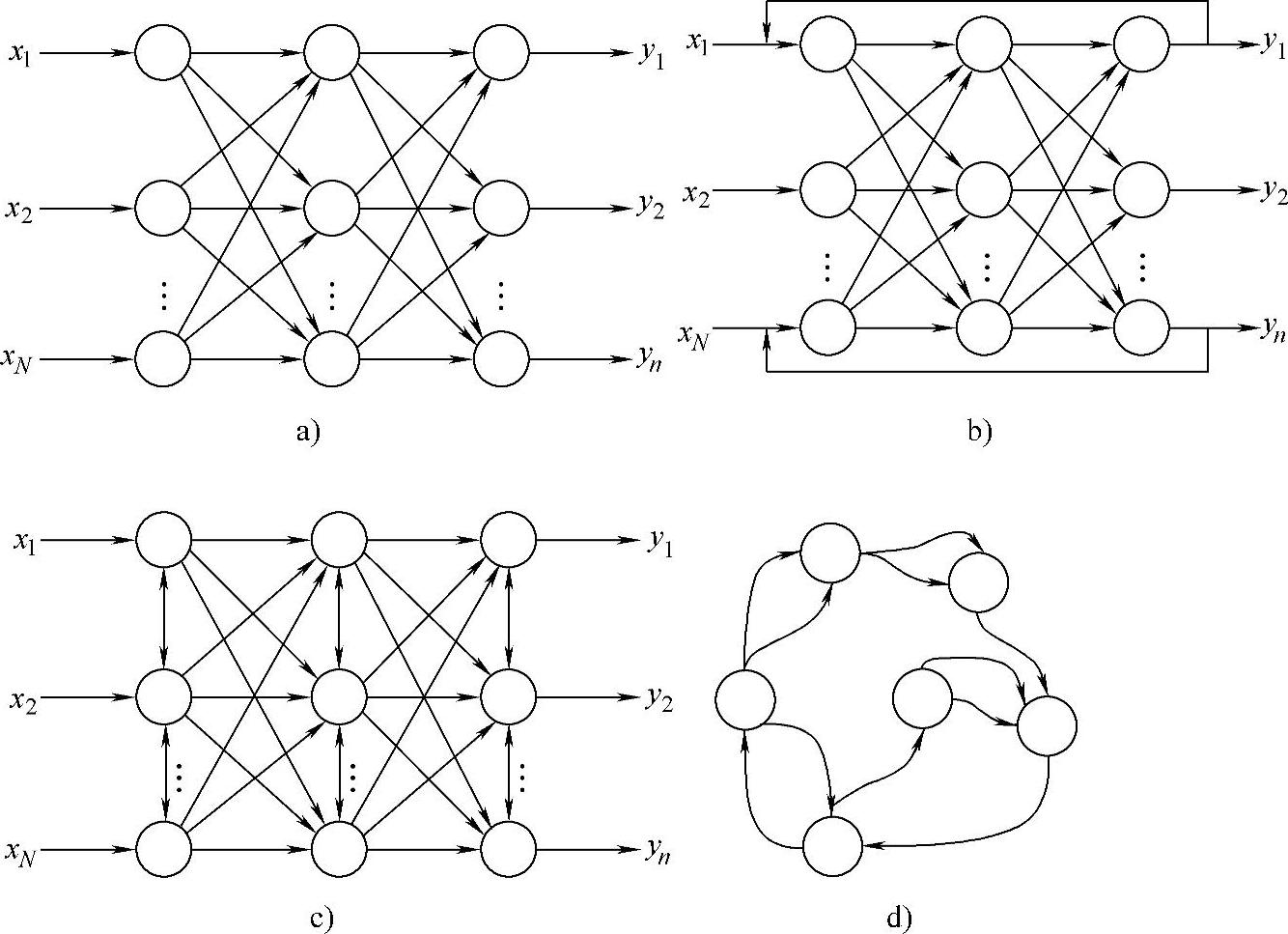
一个神经网络模型中的所有神经元按功能不同可分为输入层、隐含层和输出层,各层顺次连接。外部信息通过输入层连接到神经网络,输入层中各单元会将信息传送给相连的隐含层各单元。隐含层是除输入层和输出层之外的中间内部处理单元层,隐含层单元的处理能力决定神经网络的模式及处理能力,根据信息处理功能的不同,隐含层可以有零层到多层等不同层数。输出层产生神经网络的输出信息。神经网络的连接方式如图4-3所示。
①前向神经网络如图4-3a所示,输入信息由输入层顺次通过中间各层,加权后传递到输出层后输出。每层的神经元只接受前一层神经元的输入,各神经元之间不存在反馈。
②具有反馈的前向神经网络如图4-3b所示。在层次网络结构中,只在输出层到输入层存在反馈,即每一个输入节点都有可能接受来自外部的输入和来自输出神经元的反馈,网络本身还是前向型的。
③层内互联前向神经网络如图4-3c所示。在前向神经网络中有的在同一层中的各神经元相互有连接,通过层内神经元的相互结合,可以实现同一层内神经元之间的横向抑制或兴奋机制,这样可以限制每层内能同时动作的神经元数,或者把每层内的神经元分为若干组,让每组作为一个整体来动作,但是从外部看网络仍是前向型网络。自组织竞争网络通常采用这种拓扑结构。
④互联型神经网络如图4-3d所示,是指网络中任意两个单元都有可能有相互连接的关系,有的神经元之间是双向的,有的是单向的。互联网络又分为局部互联和全互联。全互联网络中每个神经元的输出都与其他神经元相连,而局部互联网络中,有些神经元之间没有连接关系。
 (https://www.xing528.com)
(https://www.xing528.com)
图4-3 神经网络的连接方式
a)前向神经网络 b)具有反馈的前向神经网络 c)层内互联前向神经网络 d)互联型神经网络
在简单的无反馈前向网络中,给定某一个输入信号,网络能迅速产生一个相应的输出信号,传输过程就结束了。而在互联网中,信号要在神经元之间反复往返传递,神经网络处在一种不断改变状态的动态之中。从某个初始状态开始,经过若干次的变化,可能会到达某种平衡状态,产生某一稳定的输出模式,但是也有可能进入周期振荡或其他平衡状态,例如混沌状态。
3)神经网络的学习。神经网络的学习是指神经网络在外部环境的刺激下调整神经网络参数,使神经网络改变各神经元连接权值,对外部环境做出趋近于理想反应的过程。能够从环境中学习并提高自身性能是神经网络最有意义的性质,神经网络经过反复学习来达到对环境的了解,离开了学习,神经网络就失去了自适应、自组织能力。根据学习环境的不同,神经网络的学习方式可分为监督学习和非监督学习。
①在监督学习中,神经网络将实际输出与期望输出相比较,得到误差信号,按照一定的准则调整各神经元连接的权系数。期望输出又称为导师信号,是评价学习的标准,故这种学习方式又称为有导师学习。使用监督学习的神经网络模型有反传网络、感知器等。
②非监督学习时,没有标准信号提供给网络,直接将网络置于环境中,神经网络仅根据其输入调整连接权系数和阈值,网络的学习评价标准隐含于内部,学习阶段与工作阶段成为一体,学习规律的变化服从连接权值的演变方程。Hebb学习规则、竞争学习规则等都是非监督学习模型。
学习算法是指针对学习问题的明确规则,学习类型是由参数变化发生的形式决定的,学习算法不同,对神经元权值调整的表达不同。学习算法的选择或设计是要根据所需神经网络的结构、神经网络与外界环境连接形式的不同而不同的。基本的学习算法有:Hebb学习规则、δ学习规则、随机学习算法、竞争学习算法等。
4)BP神经网络模型与RBF神经网络模型。随着神经网络理论研究的深入,性能更优的复杂网络开始兴起,如BP、RBF、CP、ART网络等。其中多层前馈神经网络中的误差反向传播算法(Back Propagation,BP神经网络)最为常用,其优势主要为结构简单、易于编程,此外,在理论上它具有能够逼近任意非线性连续函数的能力。BP算法的提出,成功地解决了求解非线性连续函数的多层前馈神经网络权重调整问题。
BP神经网络结构与学习过程如图4-4所示,BP神经网络的学习过程由信息的正向传播和误差的反向传播两个过程组成。外界的输入信息由输入层各神经元接收,并传递给中间层各神经元;中间层可以根据网络处理能力的需求,设计为单隐层或者多隐层结构,中间层是信息变换的核心层;中间层将处理后的信息传递到输出层各神经元,由输出层向外界输出信息处理结果,这样就完成了一次学习的正向传播处理过程。正向传播时每一层神经元只影响下一层神经元。正向传播的实际输出信息会与期望输出信息进行比较,如果有误差则进入误差的反向传播过程。误差通过输出层,按误差梯度下降的方式修正各层权值,向隐层、输入层逐层反传,动态迭代搜索一组权向量,使网络误差函数达到最小值,从而完成信息提取和记忆过程。反复重复信息正向传播和误差反向传播,不断调整各层权值,就是神经网络学习训练的过程,这个过程一直进行到网络输出的误差减少到可以接受的程度,或者预先设定的学习次数为止。
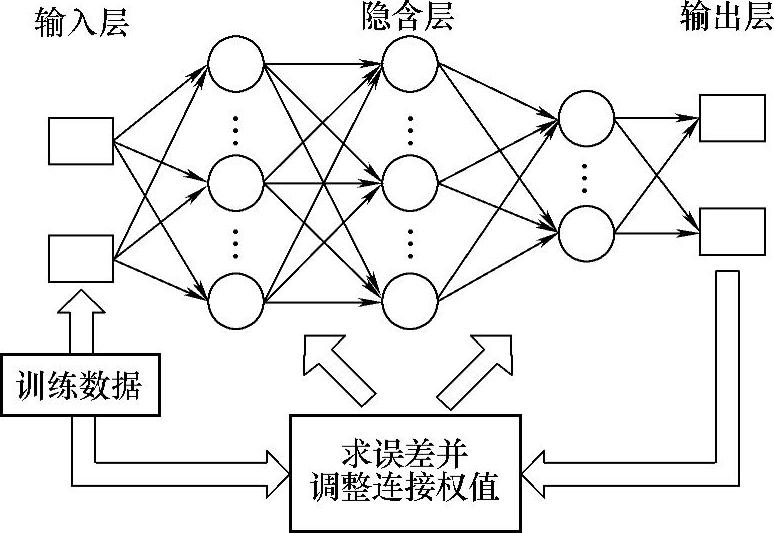
图4-4 BP神经网络结构与学习过程
传统BP网络具有思路清晰、结构严谨、工作状态稳定、可操作性强等特点,但是也存在一些缺陷,如易陷入局部极小点,学习过程收敛速度慢,网络结构选择人为性较大,缺乏指导规则等。所以在实际应用BP算法的过程中,一般都会在BP算法的基础上进行改进,以达到不同应用的目的。
RBF神经网络可以克服传统前馈神经网络(例如BP)的很多缺点,具有很好的通用性,如果存在足够多的隐藏层神经元,RBF能以任意精度近似任何连续函数。RBF神经元通常只对输入刺激起局部反应,即只有当输入落在输入空间的一个局部区域时,才会产生一个重要的非零值响应。RBF神经网络有很多优点,其训练速度很快,且在训练时不会发生振荡,也不会陷入局部极小。
RBF神经网络有3层:输入层由将网络和它的环境连接起来的源节点组成,中间层是网络里唯一的隐藏层,输出层提供对应输入层的活动样本网络响应。在RBF神经网络学习过程中,RBF神经元先计算输入与中心之间的距离,然后再对这一距离进行某种非线性变换。输出层和隐藏层分别采取不同的学习策略完成不同的任务,输出层采用的是线性优化策略对线性权进行调整,而隐藏层采用非线性优化策略对传递函数的参数进行调整。
(2)人工神经网络在闪光对焊接头质量预测中的应用 在闪光对焊过程中,神经网络主要应用于在线监测焊接接头质量,分析数据进行焊接接头质量的预测与检测等方面,也可用于改善焊机的控制、提高焊机性能等。
吕其兵等针对刘国东等提出的BP(误差反向传播)神经网络归一化模型进行了改进,得到了适合钢轨交流闪光对焊落锤质量预测的BP神经网络归一化模型。基于LabView开发软件编制了高速采集系统,采集U71Mn钢轨焊接正交工艺试验的焊接电流、焊接电压和动立柱的位移,并从中提取加速烧化前一阶段的闪光率、能量输入、焊接时间和烧化量等特征量,作为BP神经网络预测模型的输入量。建立了输入层单元数为5、隐含层单元数为14的BP神经网络焊接接头落锤质量的预测模型。以正交试验的27个焊接接头中的17个作为训练样本,对预测模型进行训练;以余下的10个作为检验样本,采用将训练后的预测模型进行预测,预测准确率达到90%。吕其兵等在2008年提出了基于加速阶段闪光率、低压二极稳定烧化阶段闪光率、焊接接头的能量输入、烧化量、焊接时间、低压二极稳定烧化阶段短,断路权重因子、加速阶段的短/断路权重因子、顶锻量等影响焊接接头灰斑面积的特征量,作为输入量的RBF神经网络焊接接头灰斑面积的预测模型,以29个工艺试验焊接接头中的19个作为训练样本,对预测模型进行训练,以余下的10个作为检验样本,确定了扩展速度为1.5的预测模型,并采用训练后的预测模型进行预测,按国家铁路局标准TB/T 1632.2—2014要求预测准确率达到了100%。
易帆讨论了将神经网络用于混沌时间序列预测的可行性,结合混沌时间序列特性,提出改进的算法,确定BP网络结构,用改进的BP算法建立了闪光对焊焊接接头质量在线预测模型,仿真结果表明该方法是有效的。陈建在其毕业论文中建立了钢轨闪光焊机焊接电流、焊接电压和闪光声信号同步数据采集系统,并通过试验获得了相关数据。利用小波分析方法提取闪光声信号的频带能量信息,计算各频率区间段能量数值及各频率区间段能量占信号总能量的百分比,以各频带能量百分比构造特征向量作为RBF神经网络的输入向量,以闪光稳定性参数闪光率作为输出向量建立神经网络预测模型。分析结果表明,RBF神经网络预测模型能够在一定程度上映射闪光率的大小。
荣茜等针对焊机驱动系统的实际工作特点,基于RBF神经网络,离线辨识出被控对象的逆,并结合低通滤波器构建出干扰观测器,用于预测并消除系统内外的干扰。采用单神经元复合控制用于提高系统的动、静性能和轧制坯与焊机间的同步跟踪性能。仿真结果表明,该控制策略基本上消除了轧制坯和焊机间的机械耦合力,提高了焊机的动态性能。王睿等建立了闪光焊机液压系统的数学模型,提出了一种基于单神经元-参数自调节的控制模型,通过神经元控制和模糊控制相结合,发挥两种智能控制方法的优势,实现闪光焊机顶锻液压系统的位置跟踪。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。